在2025年的春天,机器人行业的风口正迅速收窄,留给新入局者的机会已然不多。曾经,投资人们如地毯式搜索般扫过每一个机器人项目,那些尚未完成交割的项目在一夜之间便找到了归属,而曾经犹豫不决的投资者也变得果敢起来。
尽管人形机器人本体市场的增速已逐渐触及天花板,但人们的目光并未因此局限,而是更多地投向了其背后庞大且错综复杂的产业链。然而,现实是残酷的,窗口正在迅速关闭,仅留下了一道狭窄的缝隙。在过去两年里,当人形机器人的浪潮还在水下暗暗涌动时,产业链上游的一些企业已经悄然成长为了低调却价值不菲的投资标的。
零差云控便是这样一个典型的例子。自2016年成立以来,这家企业便专注于高可靠、高精度的机器人核心零部件的生产制造,特别是机器人关节和编码器。2018年,零差云控凭借其自主研发的高精度编码器,首次推出了标准一体化关节模组设计,并迅速进入了批量生产阶段。在此期间,公司完成了多轮数千万级的融资,吸引了包括比邻资本、琥珀资本、松柏投资等多家知名投资机构的参与,当前的估值已经远超10亿元。
实际上,在人形机器人兴起之前,包括医疗领域的手术机器人、服务机器人,以及工业领域的汽车制造、3C电子等行业,已经对关节产生了大量的需求。零差云控的创始人贾玺庆向记者指出:“在人形机器人热度上升之前,我们就已经将关节尺寸做得非常小。而且,不只是人形机器人市场,其他行业也有着越来越细分的需求。例如,腹腔镜手术机器人就有着强烈的刚需,它能实现更快、更精准的手术方式,减小创面、缩短愈合时间,同时还能使远程手术成为可能,让偏远地区的患者也能享受到专业医生的手术操作。”
零差云控的现状代表了产业链上大多数公司的选择。他们并未将全部希望寄托在人形机器人这一前途未卜的行业上,而是率先在更为成熟的领域获得了收入。目前,零差云控的产品已经在工业机器人、协作机器人、手术机器人、物流机器人、仿生机器人以及人形机器人等多个领域实现了落地应用,其下游客户涵盖了海内外头部的科技厂商、机器人公司和汽车制造商等,总数已超过2000家,机器人关节的累计出货量接近5万套,销售额在行业中排名第一。
据贾玺庆透露,在零差云控目前的营收构成中,用于工业、物流和医疗场景的关节收入贡献占比最大,接近50%。而人形机器人的销售占比虽然只有近15%,但在近两年却呈现出迅猛的增长势头。
零差云控的最大优势在于其稳健性。他们依靠现有的客户群守住了营收的下限,而人形机器人则为他们提供了未知的上限,打开了更大的想象空间。根据共研网、高工机器人等机构的数据显示,2024年中国机器人关节模组的需求量已经达到了224.17万套,预计到2030年将增至482.01万套,市场规模有望突破689.27亿元。
“当前,人形机器人行业的客户对一体化关节的需求主要集中在更小的体积、更轻的重量、更高的负载与可靠性上。同时,在进入消费交互场景时,如何进一步降低成本也成为了关键所在。这也是我们短期内产品迭代的主攻方向。”贾玺庆表示,“我们相信,随着机器人在日常生活中的应用越来越广泛,关节市场还有着巨大的发展空间等待我们去挖掘。”
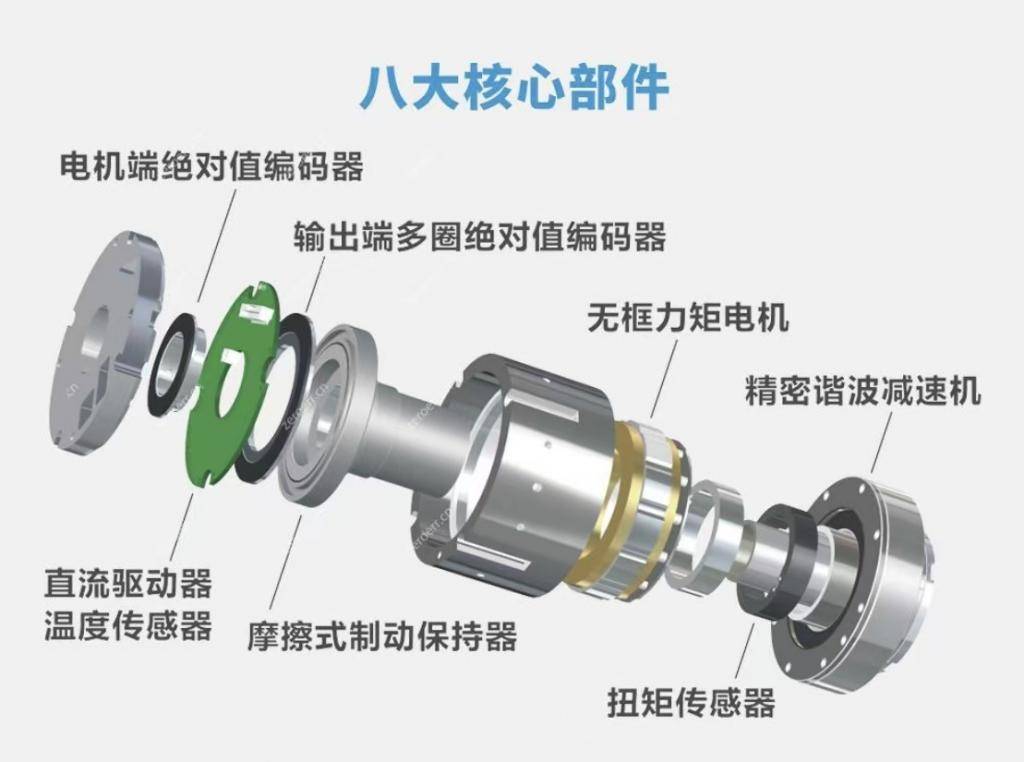
零差云控的关节部件由电机端的绝对值编码器、输出端的多圈绝对值编码器、无框力矩电机、谐波减速机、制动保持器、伺服驱动器和扭矩传感器等组成。其中,编码器相当于一个精密的“角度反馈系统”,能够实时监测机器人关节的位置,并将这一信息反馈给控制系统。
在零差云控的eRob系列关节模组产品中,电机端和减速机的输出端均内置了重复定位精度达±7角秒、绝对定位精度为±15角秒的绝对值编码器,形成了全闭环位置控制,从而避免了减速机的齿隙、磨损和制造误差对机器人关节定位精度的影响。这也是目前业内精度最高、响应速度最快的谐波机器人关节。
以医疗机器人为例,医疗机器人多用于人体内手术,因此对核心零部件的重复定位精度、功耗发热、安全性保护以及力矩控制等指标要求极为严苛。而在人形机器人中,零差云控自研的编码器可以实现更精准的关节位置调控,保障机器人在进行物料搬运、零件装配等操作时,能准确地抵达目标位置,从而提升生产效率与产品质量。

当前,人形机器人的“躯干”和“四肢”主要有谐波减速机、行星减速机和行星滚柱丝杆三种传动方式。其中,行星滚柱丝杆主要用于完成直线类驱动,而谐波减速机和行星减速机则作为传动部件的关节驱动来完成旋转类运动。
行星减速器承载能力强,能够承受较大的扭矩与负载,且成本相对较低,在大规模应用时可降低整体设备成本。但其单级传动减速比相对较小,更适用于重载工况场景、对精度要求相对不高的运动结构。贾玺庆指出:“行星减速器的一大优势在于,我国有着完善的产业链基础,相关加工设备在国内机械加工行业的保有量巨大。行星减速机结构简单、设计改动方式灵活,其齿轮可以轻松地与关节的其他零部件融合在一起进行设计。”
然而,对于人形机器人来说,其结构复杂、关节数量多,超过40个,这就要求关节不仅要具备足够高的功率密度,还需在体积、重量上严格控制,以契合人形机器人紧凑的身形。因此,行星减速器在这一方面的表现可能略显不足,而谐波减速器则展现出了显著的优势。谐波减速机可以在同样的空间内实现更大的传动比,并且通过更高的传动精度和更小的齿隙,使机器人具备执行精细操作任务的能力。
贾玺庆告诉记者,零差云控专注于谐波减速器方案的关节,其体积小、重量轻,与人形机器人轻盈结构的需求不谋而合。而且,谐波的传动精度极高、单级传动比大,能保证机器人的关节运动达到极高的精准度。
当然,目前谐波方案仍有其局限性。一方面,谐波减速机受限于加工设备门槛高、资金投入大、加工工艺要求严格,还有更为关键的材料、热处理、齿形设计等技术难关,需要企业投入大量资金人力用于研发和技术积累。另一方面,在人形机器人量产难以推进的现状下,作为核心零部件的谐波减速机短期内也面临着成本无法降低、大规模应用受限的矛盾。
“近年来,我国正在加速缩小标准谐波减速器与进口谐波减速器的差距。但如果想实现像行星方案一样深度定制谐波机器人关节,目前还非常困难。”贾玺庆坦言,“目前各个企业还陷于先有鸡还是先有蛋的怪圈中:深度定制的前提是需要大批量订单,而大批量订单的前提是先有用于测试的深度定制样机。谐波的价格相比行星大概贵五倍左右,这也进一步限制了谐波机器人关节的更大批量应用。”
贾玺庆认为,谐波和行星两种传动方式在寿命、抗冲击能力、噪音、失效形式等方面的不同表现,决定了短时间内市场很难界定哪一种传动方式更优。谐波、行星减速器关节将长期并行存在,根据最终的人形机器人整机要求,在不同要求场景中选择合适的传动方式仍是最优方案。
根据《2024年中国人形机器人行业研究报告》,按量产规模不同,人形机器人降本大致可分为三个阶段:小批量千台量级生产,降本20%-30%至约10万美元;万台级别降本50%至5万美元;数十万至百万台大规模量产,降本70%-80%至2-3万美元。一旦量产实现,以关节等为代表的核心零部件市场也将迎来爆发式增长。
为了尽量覆盖更多用户,针对不同领域、不同应用场景的需求,零差云控发布了多款型号的关节,包括主营的eRob直筒I型系列、eRob转角T型系列等。在尺寸方面,eRob关节模组的最小模组直径仅70mm、最大容许扭矩达70Nm,最大模组直径为170mm、最大容许扭矩达1180Nm,对比市场上其他同等负载能力的关节模组体积最小。这种小尺寸实现高扭矩输出的特性,在实际应用中具有显著优势。
例如,在物流仓储场景中,用户会选用最小模组的关节,在有限的环境内驱动机器人,满足狭小的仓储空间内灵活作业的需求。而在手术机器人中,更小的关节体积可减少多条手术机械臂的间距,多种手术器械可通过更小的创面来进行手术操作。更小的关节体积也为人形机器人的外形尺寸不断逼近真实的人体尺寸提供了可能性。