在六月的科技浪潮中,零次方机器人公司宣布了一项重大创新突破,正式推出了“全模态”具身数据全链路解决方案,标志着国内首家成功实现专项场景超长序列多任务连贯操作的机器人企业再次引领行业前行。
该方案直击具身智能模型训练中的痛点,如数据模态缺失、采集流程繁琐、任务数据管理复杂以及模型训练推理部署门槛高等问题。零次方提出的解决方案覆盖了从“全模态”数据采集设备、数据采集与管理平台、模型训练到模型推理的全方位流程。
该方案的设计着眼于未来3-5年内具身数据的需求,紧跟技术发展趋势。当前,具身智能模型技术正处于快速发展阶段,各研究团队正积极探索更丰富的数据模态。零次方指出,当前的技术路线主要包括视觉-关节融合、语义-视觉-关节融合、视觉-关节-力联合建模等,而更全面的模态架构正逐渐成为新趋势。
在此背景下,零次方机器人数据采集中心的全模态数据架构展现出了两大核心优势:一是维度兼容性,能够自然降维生成任意子模态数据集,兼容现存所有算法范式的训练需求;二是价值持续性,预设传感器冗余通道,集成工具标注对齐多模态数据流,为未来可能出现的VLA、跨模态对齐、物理因果推理等具身模型提供数据支持。
为了实现这一前瞻性设计,零次方推出了“全模态”数据采集人形机器人ZERITH-H1。该机器人采用了高度拟人化的上肢结构设计,关节自由度布局严格参照人体工学,显著扩展了关节活动范围,实现了超越成年男性的灵活操作空间。
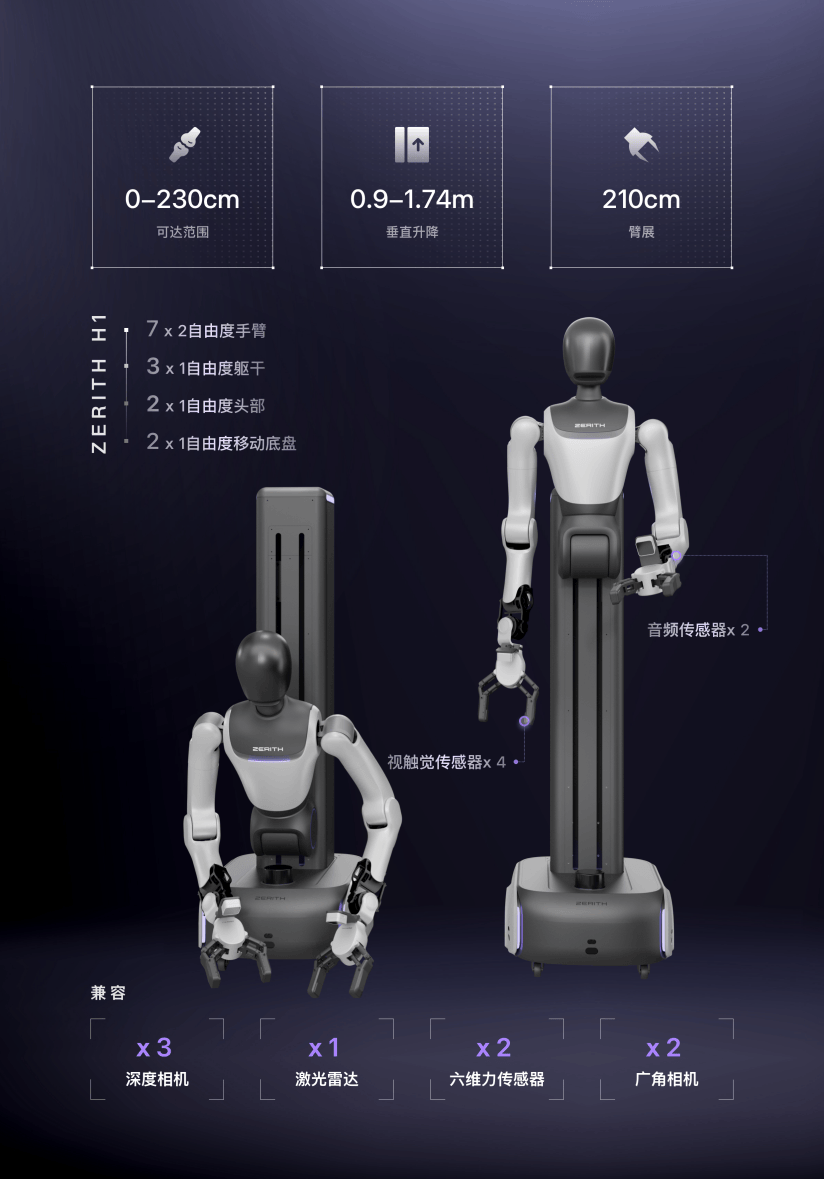
ZERITH-H1在设计阶段即整合了各种模态的传感器,能够实现对二维视觉信息、三维空间信息、关节信息、力触觉信息以及声音信息的全面采集。特别是其触觉夹爪,集成了高分辨率视触觉传感器,实现了对抓取力触觉的精准感知。

为了满足实时同步操作的需求,零次方还推出了低延迟、高动态响应的遥操系统,实现了机器人与采集者之间的“孪生式”映射同步感知。同时,整体设备连续运行时间超过4小时,满足了长时间不间断的数据采集需求。

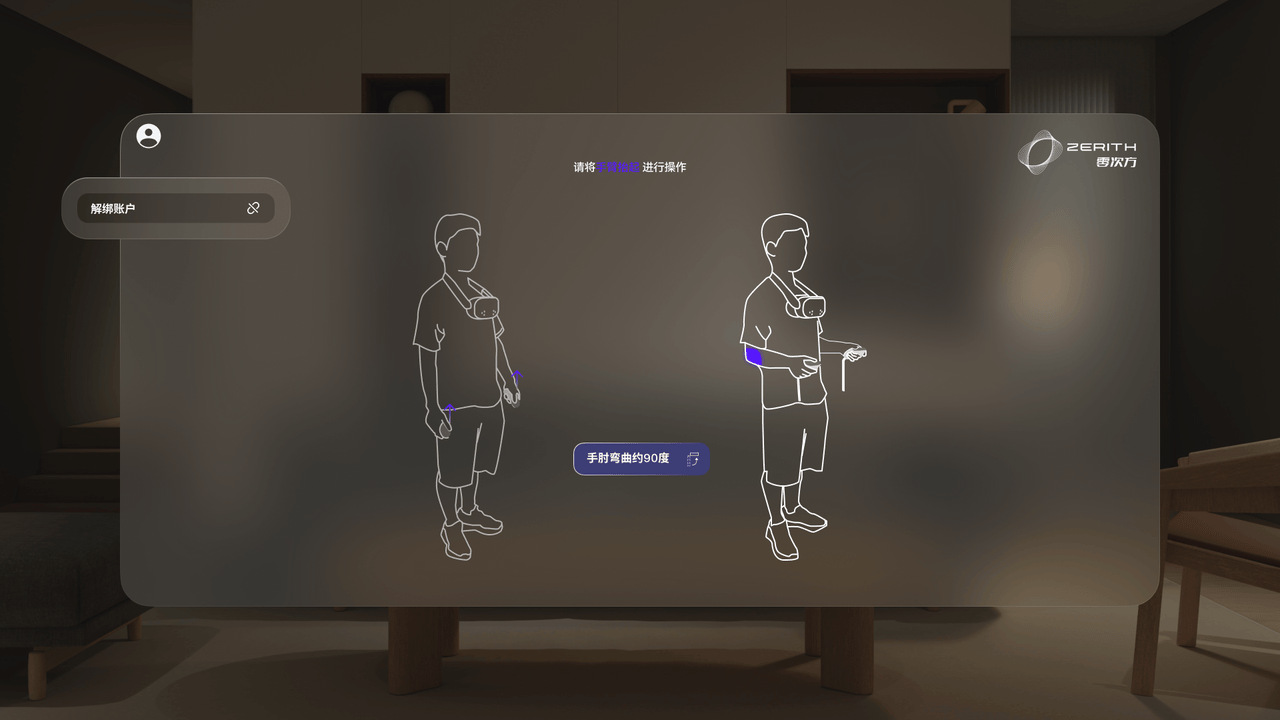
零次方还自研了ZERITH-VR APP,基于主流VR设备,实现了遥操作设备与机器人本体、具身数据管理平台之间的超低数据传输延时。通过“一键式”设备连接和“引导式”数据采集工作流,用户可以快速掌握复杂任务数据采集能力,确保数据收集质量并提升采集效率。
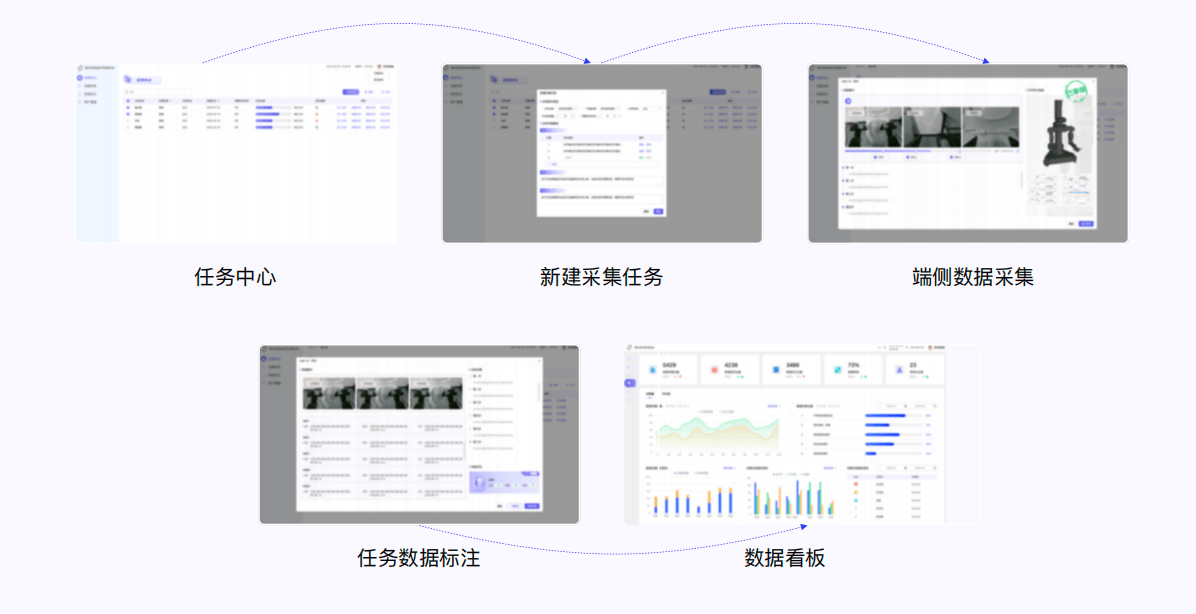
为了应对数据采集任务多样、采集流程繁杂等挑战,零次方还自研了具身数据采集管理平台,用于数据全流程管理。该平台具有模块化、高易用性的特点,能够对具身任务数据进行分类、清洗、标注和检索等操作。
在模型训练和推理方面,零次方深度集成了AI训练工具Swanlab,实现了对模型训练的全过程记录、实时监控和数据可视化。同时,平台兼容主流开源算法框架和基座模型的后训练接口,提供了符合许可证要求的快速训练接入能力。在模型推理上,机器人最高可选配500TOPS算力主机,实现了丝滑动作执行和真实场景落地效果。