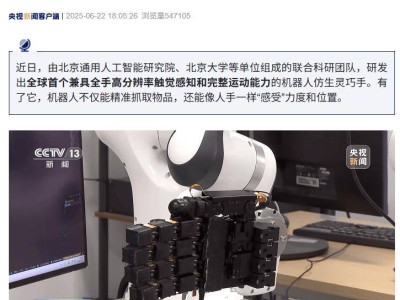
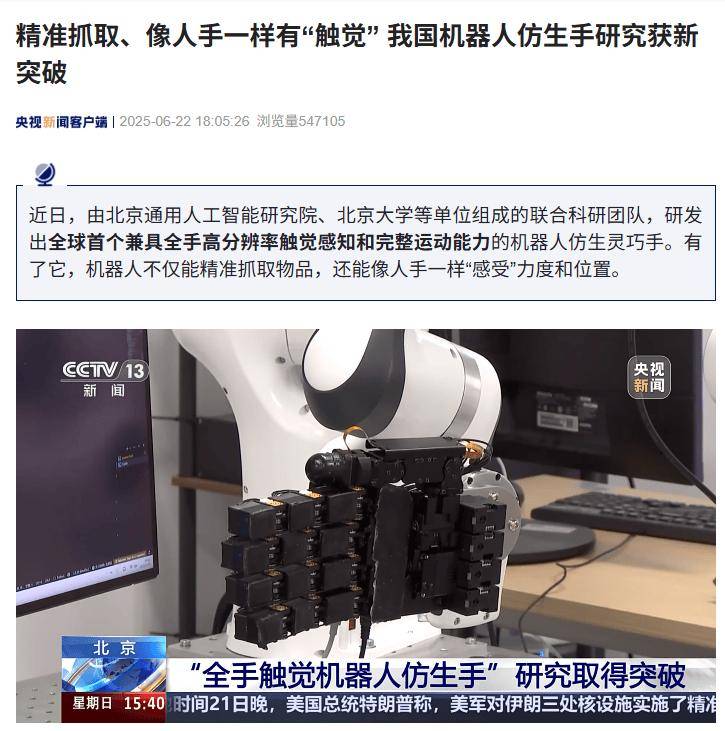
近期,一项由北京通用人工智能研究院携手北京大学等机构的联合科研项目取得了突破性进展。科研团队成功研发出一款具备全手高分辨率触觉感知与全面运动能力的机器人仿生灵巧手,这一创新成果在全球范围内尚属首次。
这款灵巧手,被命名为F—TAC Hand,其能力之强大,令人叹为观止。它不仅能在执行抓取任务时展现出极高的精确度,更令人惊喜的是,它还能像人类的手一样“感知”力度与位置,这一特性无疑为机器人的应用开辟了全新的领域。
F—TAC Hand的神奇之处在于其手掌表面覆盖了70%的高分辨率触觉传感器。这些传感器的空间分辨率高达0.1毫米,换算下来,每平方厘米竟拥有1万个触觉像素,这一数据远超当前市面上的其他机器人灵巧手。如此密集的触觉像素,使得F—TAC Hand在感知能力上实现了质的飞跃。
除了触觉灵敏之外,科研团队还为F—TAC Hand配备了一套全新的智能算法,这一算法能够模仿人类的抓取习惯。这意味着,F—TAC Hand在执行任务时,不再像传统的机器人那样只能逐个拿取物品,而是能够“自主思考”,根据当前情况动态规划下一步动作。例如,它会根据抓取物品后手掌的剩余空间、周边物体的位置和形状等因素,灵活调整抓取策略。
在研发过程中,科研团队遇到了诸多挑战。他们发现,现有的触觉传感技术在覆盖率、分辨率和耐久性等方面都存在不足,这严重限制了仿生灵巧手在实际生活中的应用。为了克服这一难题,科研团队历经艰辛,终于研发出了一套全新的触觉感知方案。
这套全新的触觉感知方案不仅极大地提高了F—TAC Hand的触觉灵敏度,还为后续的研发工作奠定了坚实的基础。在此基础上,科研团队进一步模仿人类手部结构,巧妙地将17个高分辨率触觉传感器以6种不同的方式组合在一起。这一设计使得F—TAC Hand在拥有精准感知能力的同时,还能实现灵巧的活动。