人形机器人,这一融合了人类形态与先进技术的创新产物,正逐步在工业、医疗等多个领域展现其潜力。然而,尽管具备仿人外形、环境感知及智能决策学习能力,人形机器人的商业化进程仍面临诸多挑战,其中运动控制技术尤为关键。
人形机器人的运动控制涵盖了硬件与软件算法两大方面。硬件部分包括控制器等核心组件,而软件算法则涉及基于模型的控制方法和基于学习的控制策略。基于模型的控制,如模型预测控制(MPC)和全身协调控制(WBC),具有高可解释性,但其效果严重依赖于模型的精确度。相比之下,基于学习的控制方法,如强化学习和模仿学习,虽能自主学习和优化控制策略,但各自存在样本效率低和数据局限性等问题。混合学习方法,作为两者的结合,正逐渐成为研究的热点。
在人形机器人领域,一些头部企业如特斯拉、宇树科技等,凭借出色的运动控制技术脱颖而出。这些企业往往自主研发与运动控制相关的软件算法,而在硬件开发上则分工明确,训练用的硬件多由第三方专业公司提供。这种合作模式不仅加速了技术创新,也推动了人形机器人技术的整体进步。
在人形机器人的运动控制技术上,软件算法的优化尤为关键。强化学习通过不断试错来寻找最优策略,虽然能够自主学习,但样本效率低下成为其一大瓶颈。模仿学习则通过演示数据来学习控制策略,虽然学习效率相对较高,但数据的局限性和泛化能力仍是其面临的挑战。混合学习方法,通过结合强化学习和模仿学习的优势,有望在解决这些问题上取得突破。
人形机器人的广泛应用,离不开运动控制技术的持续进步。未来,随着算法的不断优化和硬件性能的提升,人形机器人将在更多领域发挥其独特优势。无论是工业生产中的自动化操作,还是医疗领域的辅助护理,人形机器人都将展现出更加卓越的性能和更加广泛的应用前景。
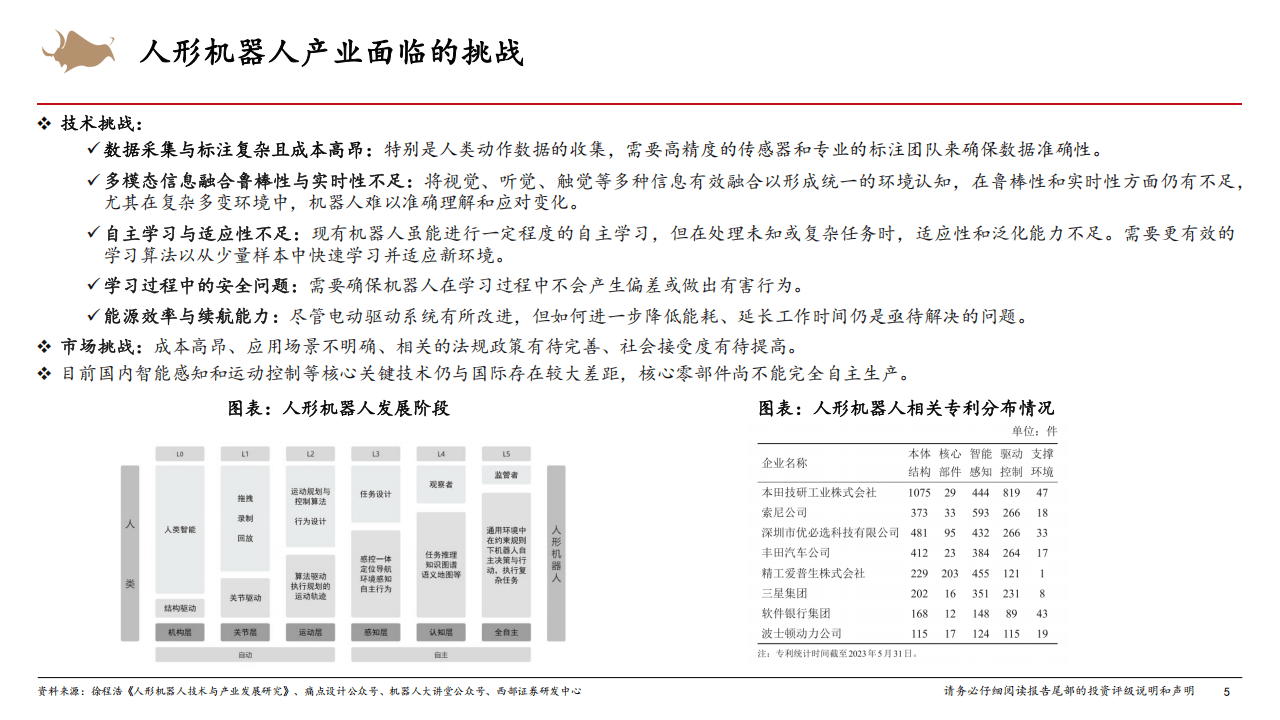
尽管国内在人形机器人核心技术方面与国际先进水平仍存在差距,但通过持续的技术创新和合作研发,我们有理由相信,人形机器人将在不远的将来实现更加广泛的商业化应用,为人类社会的发展贡献更多力量。