在上海智能工业中心的璀璨舞台上,一场聚焦于智能科技未来的盛会——“具赋新能,智驱未来”青年科学家成果转化暨具身智能高质量发展研修会拉开帷幕。
此次活动吸引了众多青年科学家与业界领袖的参与,共同见证了智能科技领域的最新突破。其中,复旦大学信息科学与工程学院教授、博士生导师陈涛的演讲尤为引人注目。他以《超越VLA:新一代生成式人形机器人运动大模型的探索》为题,为与会者带来了一场思想的盛宴。
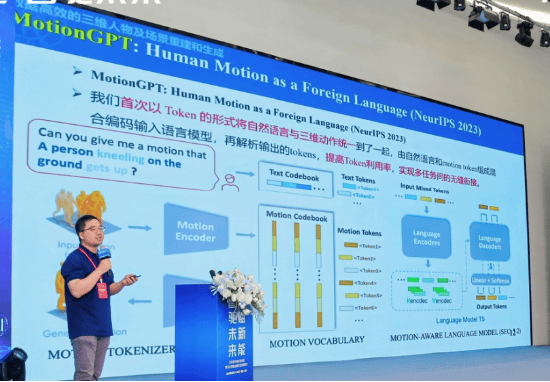
陈涛教授在演讲中深刻剖析了当前智能科技研究的现状,指出主流研究大多局限于视觉语言模型(VLA)的框架内。而他的团队则敢于突破常规,将人体运动生成巧妙地比喻为语言翻译过程,将复杂动作序列视为由“动作基元”构成的句子。这一新颖的视角为团队的研究开辟了全新的道路。
经过不懈的努力和技术迭代,陈涛团队成功研发出具有三大核心突破的动作生成大模型。该模型不仅能够实现对海量多样化动作的精准控制,还能仅凭自然语言指令生成复杂的肢体动作。更令人瞩目的是,该模型已被成功部署于实体机器人平台,展现出惊人的运动能力。
为了解决机器人动作与环境脱节的问题,陈涛团队再次展现出创新思维,研发出三维点云多模态模型。这一技术使机器人能够真正“理解”空间结构,实现具身问答、路径规划等智能交互功能。同时,针对端侧算力瓶颈,团队还研发出独特的模型压缩框架,大幅降低了算力需求,为机器人智能化降低了技术门槛。
基于这些突破性成果,陈涛团队创立了眸深智能科技企业。该企业凭借全球首创的生成式Motion系列技术,在真机部署和模型压缩领域取得了显著成就,引起了行业巨头的广泛关注和高度认可。这一创新实践不仅为中国科研力量赢得了国际声誉,更为全球具身智能产业的发展开辟了新的道路。
在全球人工智能竞争日益激烈的今天,陈涛团队的探索无疑为具身智能的发展注入了新的活力。他们的研究成果标志着具身智能正从理论探索走向实际应用,为全球智能科技的未来发展注入了无限可能。