
近日,宇树机器人在一场备受瞩目的人形机器人运动会上的表现引发了广泛讨论。一段显示该机器人在比赛中“撞人逃逸”的视频在多个国际平台上迅速传播,吸引了全球网友的关注。
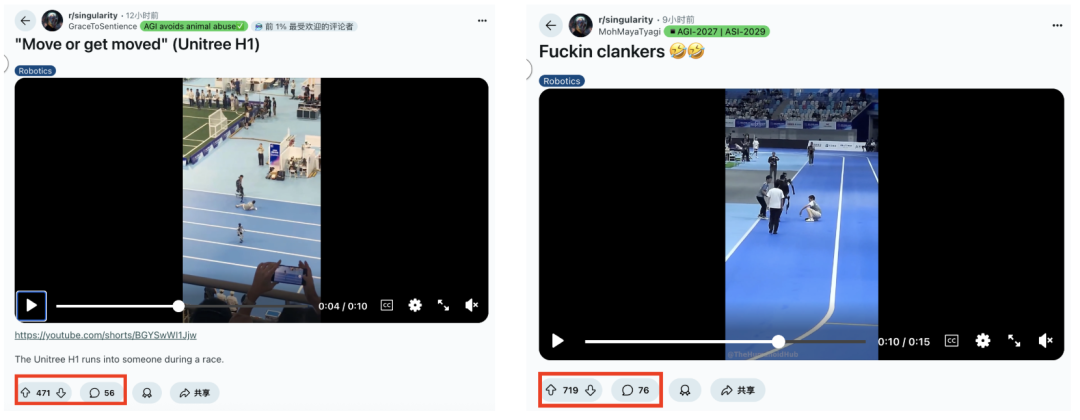
视频中,宇树机器人在奔跑过程中似乎未能及时避开前方人员,引发了对机器人安全性的担忧。不少网友指出,这一行为违背了阿西莫夫的机器人学三定律中的首要原则——机器人不得伤害人类。然而,随着事件的深入调查,真相逐渐浮出水面。
据悉,该撞人事件发生在两名人类控制员交接遥控器的瞬间,由于交接过程中的疏忽,未能及时发出避让指令,导致机器人与人员发生碰撞。这一发现让原本一边倒的舆论风向发生了微妙的变化,部分网友开始调侃这或许是“高端商战”的一种朴素手段。
尽管遭遇了这样的风波,宇树机器人在运动会上的表现依然亮眼。在1500米田径项目中,它以6分34秒的成绩夺得首金,并创造了世界纪录。不过,在比赛过程中,机器人突然减速并在场地内转圈的行为,也引发了不少争议和调侃。

对于为何在比赛中使用遥控,宇树机器人方面给出了详细解释。由于跑步是一项高度不稳定的运动,现有的传感器、算法和执行器在复杂地形上的稳定性尚不足以应对,因此人工遥控能在关键时刻提供及时干预,防止机器人失衡。在快速奔跑时,机器人的环境感知数据往往存在延迟或精度不足的问题,人工遥控能够弥补这一不足。
然而,这也引发了关于机器人自主运动能力的讨论。事实上,一些机器人已经具备了无需遥控自主运动的能力。例如,本次比赛的亚军——北京人形机器人创新中心研发的天工Ultra机器人,在赛跑时就未使用遥控。宇树的H1机器人同样具备一定的自主运动能力,但在追求速度的比赛中,宇树最终选择了遥控策略。
宇树创始人、CEO王兴兴在接受采访时表示,对于机器人犯错时的讨论总是更多,但他认为每个人对新技术、新产品都应该抱有更开放的心态。他透露,宇树机器人将在未来的比赛中实现全自主奔跑,并期待在更多领域取得突破。








