在AI技术日新月异的今天,一项新的突破正引领着行业向更深层次迈进。多模态AI领域的佼佼者考拉悠然携手上海码极客,共同推出了名为“悠然无界”的大模型,这一创新成果标志着空间智能技术迈入了全新的发展阶段。
悠然无界大模型,作为一款专为空间智能设计的多模态世界模型,不仅具备空间感知与推理能力,还融合了具身执行与交互反馈的先进功能。它将具身智能的“大脑”与“小脑”能力整合于单一模型中,实现了感知、规划、执行的闭环控制。这一突破性的设计,使得模型能够同时理解和处理数字空间、物理空间以及社会空间的信息,展现出强大的跨模态泛化能力和通用性。

据考拉悠然首席执行官沈复民介绍,空间智能被视为AI发展的下一个重要方向。现有的大语言模型虽然在数字世界中取得了显著成就,但在物理世界的应用价值仍有待挖掘。算力堆砌并不能直接转化为生产力,要弥补这一鸿沟,关键在于打造能够连接数字世界与物理世界的世界模型。悠然无界大模型正是在这一理念下应运而生,它基于2023年推出的悠然大模型进行升级,强化了感知、推理、决策和交互能力。
在训练过程中,考拉悠然采用了多元异质数据联合建模的方法,将真实数据、仿真数据与互联网数据相结合,并融入跨领域知识,从而增强了模型的通用性。这一模型能够理解自然语言形式的物理世界任务,感知具身智能本体的状态,并驱动人形机器人、无人机、机器狗等终端智能体完成各种任务。同时,它还采用了考拉悠然提出的跨模态融合-自适应感知框架,解决了三维空间感知中的一系列难题,提升了智能系统对复杂空间环境的理解与建模能力。
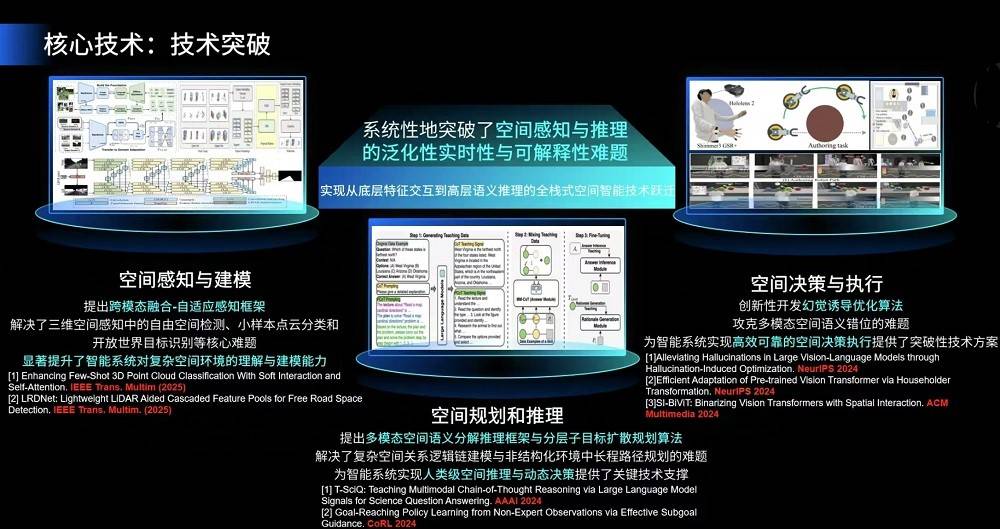
在空间规划与推理层面,悠然无界大模型通过打造多模态空间语义分解推理框架与分层子目标扩散规划算法,解决了复杂空间关系逻辑链建模与非结构化环境中长程路径规划的问题。这一突破使得智能系统能够实现人类级的空间推理与动态决策。在决策与执行方面,模型采用的幻觉诱导优化算法则解决了多模态空间语义错位的难题。
除了悠然无界大模型外,考拉悠然和上海码极客还共同推出了空间智能Agent框架MAGXAgent,以及一系列基于该框架的智能体硬件本体产品。MAGXAgent基于悠然无界大模型的世界知识与空间理解能力,具备空间探知、自主决策、动态执行和交互反馈等能力。未来,这一框架将搭载于物流卸货机器人、无人机、机器狗等任务本体上,执行应急救援、装卸运货、智能巡检等物理世界任务。

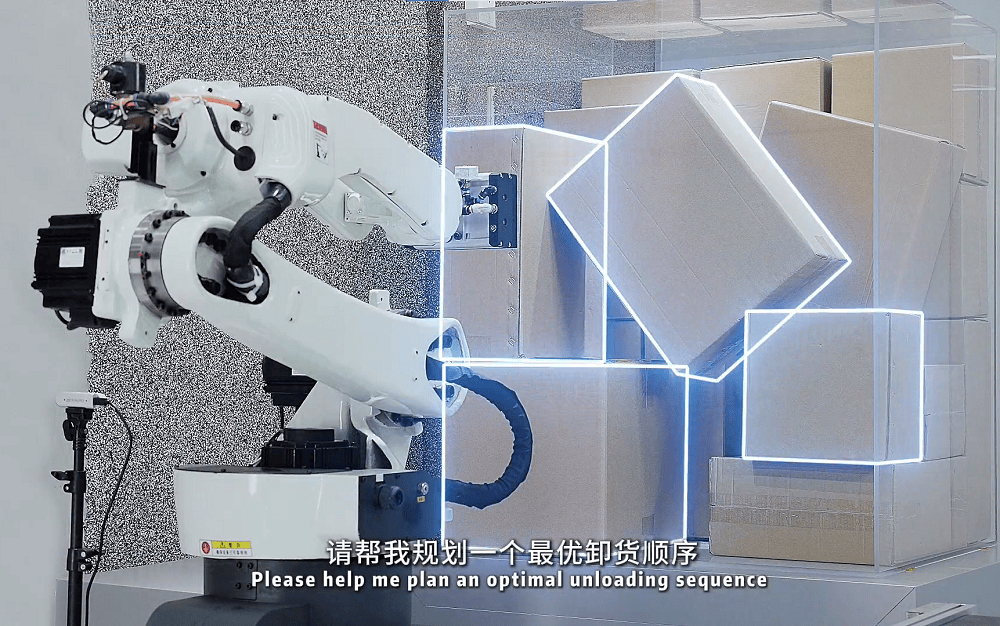
其中,MAGX Loader作为智能卸货机器人的代表,展示了悠然无界大模型能力的实际应用场景。它能够在复杂环境下完成精准目标识别、自适应位姿估计、实时障碍物评估、动态任务调度、卸货路径优化等一系列流程。用户只需输入一段语音指令,MAGX Loader即可全程自主实现货品搬运,无需人工编程。
悠然无界大模型及MAGXAgent框架的推出,不仅标志着考拉悠然和上海码极客在空间智能领域的领先地位,也为AI技术的未来发展提供了新的方向。随着越来越多的企业开始布局世界模型领域,AI技术将逐渐实现对物理世界的深入理解和推理,为人类社会带来更加智能、高效的解决方案。