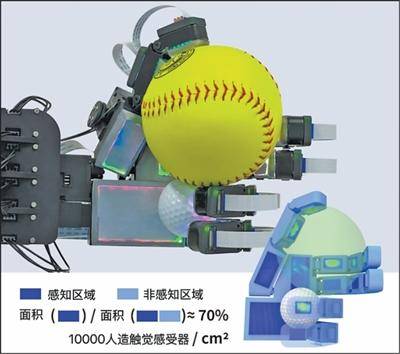
在北京通用人工智能研究院的实验室深处,一场关于机器人仿生手技术的革命正在悄然上演。一只形态逼真、动作灵活的机器人手,正展示着其惊人的能力:它不仅能够稳稳握住瓶子,还能同时精准地捏起一颗高尔夫球,准确无误地将其送至指定位置。
这项技术的核心在于“F—TAC Hand”机器人仿生手,它首次实现了类人水平的自适应抓取能力。据北京通用人工智能研究院研究员刘腾宇介绍,该仿生手掌面70%的面积集成了高分辨率触觉感知,使得它能够像人类一样,通过触觉反馈进行精细操作。这一突破性的成果,由我国北京通用人工智能研究院、北京大学以及英国伦敦大学玛丽女王学院联合研究完成,并在《自然·机器智能》期刊上发表。
对人类手部功能的研究,一直是具身智能与机器人领域的热点。刘腾宇进一步解释,人类拿取物体时,涉及触觉反馈与运动功能两大能力。而在以往的研究中,如何将这两者完美整合,一直是机器人研究的关键挑战之一。此次“F—TAC Hand”的成功,正是对这一挑战的有力回应。
为了赋予机械手“触觉”,研究团队在真实人手比例的机械手中成功嵌入了17个视触觉传感器。研究员李皖林透露,这些传感器由多色光源、柔性镀膜硅胶体、刚性支撑件、微型摄像头和传感器板构成,形成了模块化的设计。当记者用钢笔按压机械手时,后台的电脑屏幕上立刻显示出精确的接触位置、压力分布以及钢笔的纹理信息。
为了实现所有传感器的同步工作,研究团队还设计了一套多相机图像同步采集系统。研究员王濛表示,这些传感器既是感知元件又是结构部件,在不牺牲手部灵活性的前提下,实现了前所未有的触觉覆盖范围。这一设计,无疑为机械手增添了更加敏锐的“触觉神经”。
在运动控制方面,“F—TAC Hand”采用了绳驱方式,通过五根腱绳沿手指两侧布线,分别控制五指的屈伸动作。同时,关节内置扭簧结构,使得腱绳松弛时能够自动复位。这一设计使得机器人仿生手能够实现总计15个自由度与10牛顿的握力,更加接近人类手部的运动能力。
为了进一步提升机器人手的抓取能力,研究团队还开发了一种基于概率模型的算法,能够产生与人类非常相似的抓取方式。实习生李宇飏介绍,该算法涵盖了人类常见的19种抓取类型,使得“F—TAC Hand”在面对复杂环境时表现出更强的适应性。与没有触觉反馈的系统相比,“F—TAC Hand”在执行任务时的平均成功率从53.5%提升至100%。
北京通用人工智能研究院院长、北京大学人工智能研究院院长朱松纯表示,这一研究成果不仅验证了全手高分辨率感知与手部运动功能的兼容性,还为探索复杂的触觉具身智能开辟了新的道路。他强调,这一成果为丰富感官反馈在智能行为中的关键作用提供了有力证据,并为超越纯计算方法的具身人工智能系统发展作出了方向性探索。