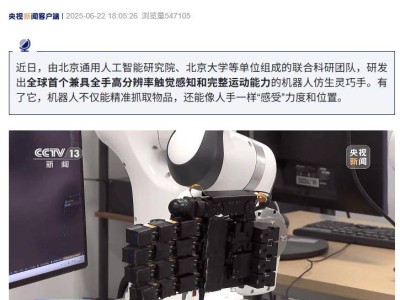
近日,一项令人瞩目的科研成果在北京问世,由北京通用人工智能研究院携手北京大学等机构的联合科研团队,成功研制出全球首款集全手高分辨率触觉感知与全面运动能力于一体的机器人仿生灵巧手。这一创新技术使得机器人不仅能精确抓取物体,还能像人类的手一样感知力度与位置。
这款被称为F—TAC Hand的仿生灵巧手,正在展示其灵活的“手指舞”,展现了中国科研团队的最新智慧结晶。其独特之处在于,手掌表面超过70%的区域覆盖了高精度的触觉传感器,空间分辨率高达0.1毫米,即每平方厘米拥有惊人的1万个触觉像素点,远超当前市场上其他同类产品的感知水平。
除了触觉的高灵敏度,F—TAC Hand还配备了一套能够模拟人类抓取习惯的新算法,仿佛为其装上了一个“智慧大脑”。传统机器人在执行抓取任务时,往往只能逐一处理物品,而F—TAC Hand则能够自主思考,根据抓取后的手掌剩余空间以及周围物体的位置和形状,灵活规划下一步动作。
那么,要让这款仿生灵巧手更加接近人手,科研团队究竟需要克服哪些技术瓶颈呢?他们又是如何突破这些难关,实现这一前沿技术的呢?
人类的手在抓取物体时,既能感知物体又能灵活运动,但对于机器人仿生灵巧手的研发来说,将这两种能力结合却极具挑战。在研发过程中,科研人员发现,现有的触觉传感技术在覆盖率、分辨率和耐用性方面均存在不足,难以满足仿生灵巧手在实际应用中的需求。为此,科研团队另辟蹊径,研发出了一套全新的触觉感知方案。

这套全新的触觉感知方案,极大地提升了仿生灵巧手的触觉灵敏度,为后续的研发奠定了坚实的基础。科研团队进一步模仿人类手部结构,巧妙地将17个高分辨率触觉传感器以6种不同的方式组合在一起,使得仿生灵巧手既能精准感知又能灵活运动。实验结果显示,与普通没有触觉反馈的机器人灵巧手相比,F—TAC Hand在面对执行误差和物体碰撞风险时,展现出了显著的适应性和更广泛的应用场景。