近期,谷歌在机器人技术领域迈出了重要一步,推出了Gemini Robotics On-Device模型,这一升级版是在其三月发布的“视觉语言动作”(VLA)模型基础上进一步优化而来。据谷歌官方介绍,该模型专为在机器人设备上本地运行而设计,代表了他们目前最顶尖的VLA技术。
谷歌DeepMind的高级总监及机器人项目主管强调,Gemini Robotics On-Device模型无需依赖数据网络,这对延迟敏感的应用来说是一大福音。它确保了即便在网络不稳定或无网络的环境中,机器人也能保持稳定的运行。这一特性使得该模型在多种应用场景中展现出极高的灵活性和可靠性。

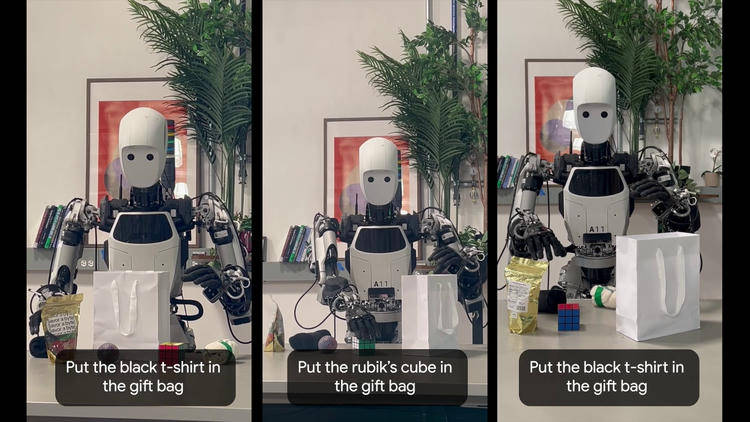
Gemini Robotics On-Device模型是专为双臂机器人设计的,旨在提升机器人应对复杂任务的灵巧性和适应能力。在之前的演示中,搭载了该本地模型的机器人展示了诸如拉开拉链和折叠衣物等基本动作的出色执行能力。谷歌表示,虽然该模型最初是为ALOHA机器人训练的,但经过调整,现已成功应用于双臂Franka FR3机器人和Apollo人形机器人。
为了进一步推动Gemini Robotics的发展,谷歌DeepMind还发布了配套的SDK。开发人员可以在MuJoCo高级物理模拟器上利用这些模型,通过向机器人展示50到100个任务演示来训练它们完成任务。这种训练方式不仅提高了机器人的学习效率,还增强了其在实际应用中的表现。
与单纯的大语言模型相比,机器人AI面临更多挑战。机器人不仅存在于物理世界中,还会改变其环境。谷歌DeepMind机器人技术负责人指出,Gemini不仅能够生成文本、写诗、总结文章甚至编写代码,现在还能生成机器人动作。这意味着谷歌的机器人模型已经能够通过大数据训练来掌握各种动作,在快速迭代中应对物理世界中的各种问题。
然而,安全性是机器人AI发展中不可忽视的问题。与对话型AI相比,机器人AI更需注重安全,以避免出现类似“终结者”这样的恐怖场景。为了保障Gemini Robotics的安全,谷歌采用了多层限制的方法。具体来说,机器人由一个底层VLA模型控制,而在其之上还有一个上级VLA模型,该模型通过推理来判断哪些指令是安全的。这种“AI管理AI”的方式为机器人的安全运行提供了有力保障。
随着谷歌在机器人技术领域的不断突破,越来越多的公司也开始关注这一新赛道。包括Nvidia在内的许多企业都在秘密研发自己的机器人项目。可以预见,未来将有更多企业在这一领域展开竞争,共同推动机器人技术的发展和创新。