在上海智能工业中心,一场关于智能科技未来的盛会悄然拉开帷幕。此次,“智驭新篇,赋能未来”青年科学家成果转化及具身智能高质量发展研修会吸引了众多目光。
活动现场,来自全国各地的百余位青年科学家与业界领袖齐聚一堂,共同探讨智能科技的前沿趋势。复旦大学信息科学与工程学院知名教授、博士生导师陈涛,以其《超越VLA:新一代生成式人形机器人运动大模型的探索》为题,为与会者带来了耳目一新的见解。
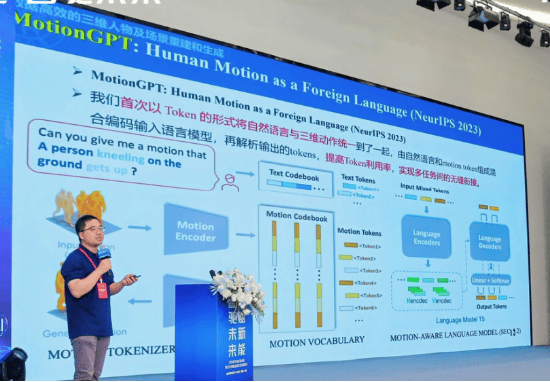
陈涛教授在演讲中深刻剖析了当前智能科技领域的研究现状,指出多数研究仍局限于视觉语言模型(VLA)的传统框架内。而他带领的团队,则勇于突破,开辟了一条全新的研究路径。他将人体运动的生成巧妙地比喻为语言翻译的过程,复杂多变的动作序列被视作由“动作词汇”串联而成的句子。这一创新性的理念,为团队早期动作生成大模型的研发奠定了坚实的基础。
经过不断的技术迭代与优化,该模型在多个方面取得了显著突破。它能够实现对海量多样化动作的精准控制,仅凭自然语言指令便能生成复杂细腻的肢体动作。更令人瞩目的是,陈涛团队已成功将这一模型应用于实体机器人平台,展现出惊人的运动能力。
为了解决机器人动作与环境脱节的问题,陈涛团队再次发力,创新性地研发出三维点云多模态模型。这一技术的诞生,让机器人能够真正“理解”空间结构,实现了具身问答、路径规划等一系列智能交互功能。面对端侧算力受限的瓶颈,团队又研发出独特的模型压缩框架,极大地降低了算力需求,为机器人智能化的普及降低了技术门槛。
基于这些卓越的科研成果,陈涛团队孵化出了眸深智能科技企业。该企业凭借全球首创的生成式Motion系列技术,在真机部署和模型压缩领域迅速崭露头角,赢得了行业巨头的广泛关注与高度认可。
在全球人工智能竞争日益激烈的背景下,陈涛团队的探索无疑为具身智能的发展注入了新的活力。他们的创新实践不仅推动了具身智能从理论到实用的跨越,更为全球具身智能产业的蓬勃发展开辟了全新的道路。中国科研力量的崛起,正引领着智能科技领域的未来走向。