在智能制造的浪潮中,人机协作已成为不可或缺的一环。然而,如何确保这一过程中人员的安全,始终是业界亟待解决的难题。近日,第二届雄安未来之城场景汇雄安国际机器人大赛上,一个名为“数字孪生驱动的人机协作安全距离快速感知系统”的项目脱颖而出,为这一问题提供了创新性的解决方案。
该项目由北京邮电大学智能工程与自动化学院教授褚明带领的团队研发,凭借其超快的响应速度、无死角的安全防护以及低廉的部署成本,一举夺得大赛一等奖。这一系统能够在48毫秒内完成对潜在危险的感知与响应,是人类反应速度的两倍多,真正实现了工业场景下人机协作的安全高效。
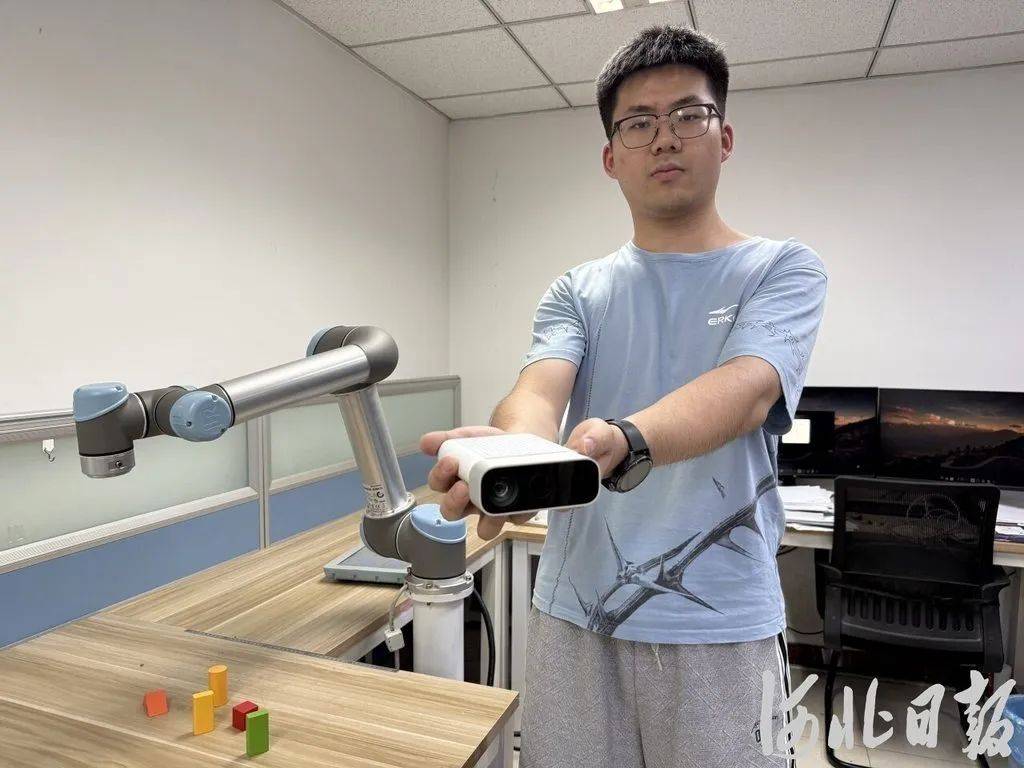
在褚明的实验室里,六轴桌面式协同机械臂正在轻盈地舞动。但当有人靠近时,一旁的电脑屏幕上立刻浮现出人体的骨骼结构,并在人与机械臂之间生成一条明黄色的动态线条,实时测量并调整二者之间的距离。一旦距离过近,系统便会立即向机器人发出“停机”或“减速”的指令,从而有效避免可能发生的碰撞事故。

褚明教授解释说,传统的人机安全监测主要依赖于激光雷达、红外和声波测距等技术,但这些方法都存在明显的缺陷。例如,激光雷达虽然能够实现全向覆盖,但响应速度慢且成本高昂;而声波测距则只能测量到正面相对的区域,存在监测盲区。这些设备几乎都需要外挂在机器人上,不仅影响工作的灵活性,甚至还可能带来新的安全隐患。
为了克服这些挑战,褚明团队将数字孪生技术与计算机视觉深度融合,开发出了一套全新的安全感知系统。该系统仅需要一个纸抽大小的深度相机作为硬件设备,就能让机器人在“零穿戴”的情况下拥有360度全场景视角。深度相机每秒能拍摄60帧画面,通过识别人体32个骨骼关键点来构建动态骨骼框架,实现精准动作捕捉。在此基础上,团队进一步筛选出25个关键点,并利用工业机器人内置的光电码盘传感器重构机器人运动姿态,从而完成人和机器人的建模。
这种高度简化的建模方式大大降低了系统数据计算量,为毫秒级实时响应提供了关键技术保障。同时,为了更真实地计算人体与机器人的安全距离,研究团队还考虑到人的胖瘦对距离的影响,为数字模型穿上了一层“肌肉外衣”。经过反复试验验证,系统的距离测量误差已经被严格控制在3.5%以内。
在采访中,记者亲身体验了这一系统的安全防护能力。无论变换何种动作和距离,机械臂始终与记者保持着安全距离。电脑屏幕上那条不断变换数据的明黄色线条,仿佛是一道无形的屏障,将人与机器人之间的潜在危险隔绝开来。
除了安全性能卓越外,该系统的部署也极其简单便捷。它仅依赖深度相机和软件模组运行,每个定焦深度相机可精准覆盖6米远范围,单个监控区域的部署成本仅2万元。这一优势使得该系统在制造企业中备受欢迎,不少企业当场表达了合作意向。
褚明教授表示,他们希望通过这次大赛,让这项技术接受市场的真实检验,并持续优化技术方案,推动实验室成果走出象牙塔,真正服务实体经济。同时,团队在人机共存领域的研究仍在持续深化,他们正在研究从仿真到实体的相关课题,推动人机协作向更高层级发展。
在褚明看来,未来的人机协作将是一幅全新的图景。机器人将不再是冰冷的执行者,而是能够理解人的意图、预判人的需求的智能伙伴。在这样的场景下,人机协作将更加默契高效,共同推动智能制造的发展迈向新的高度。