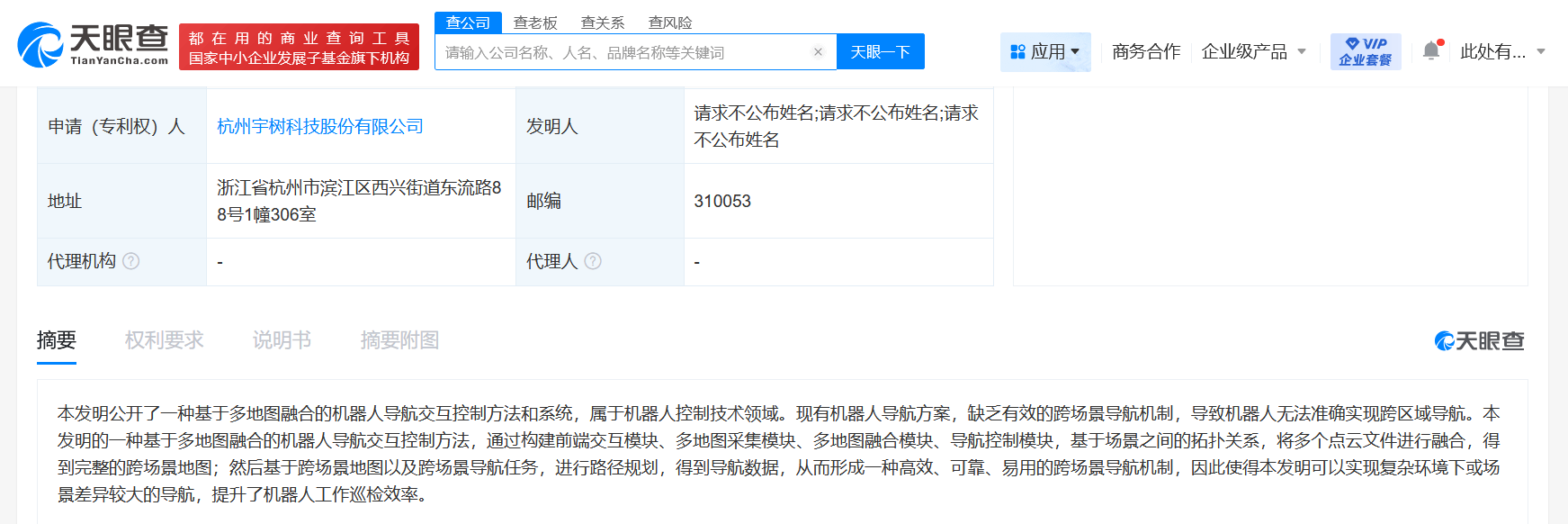
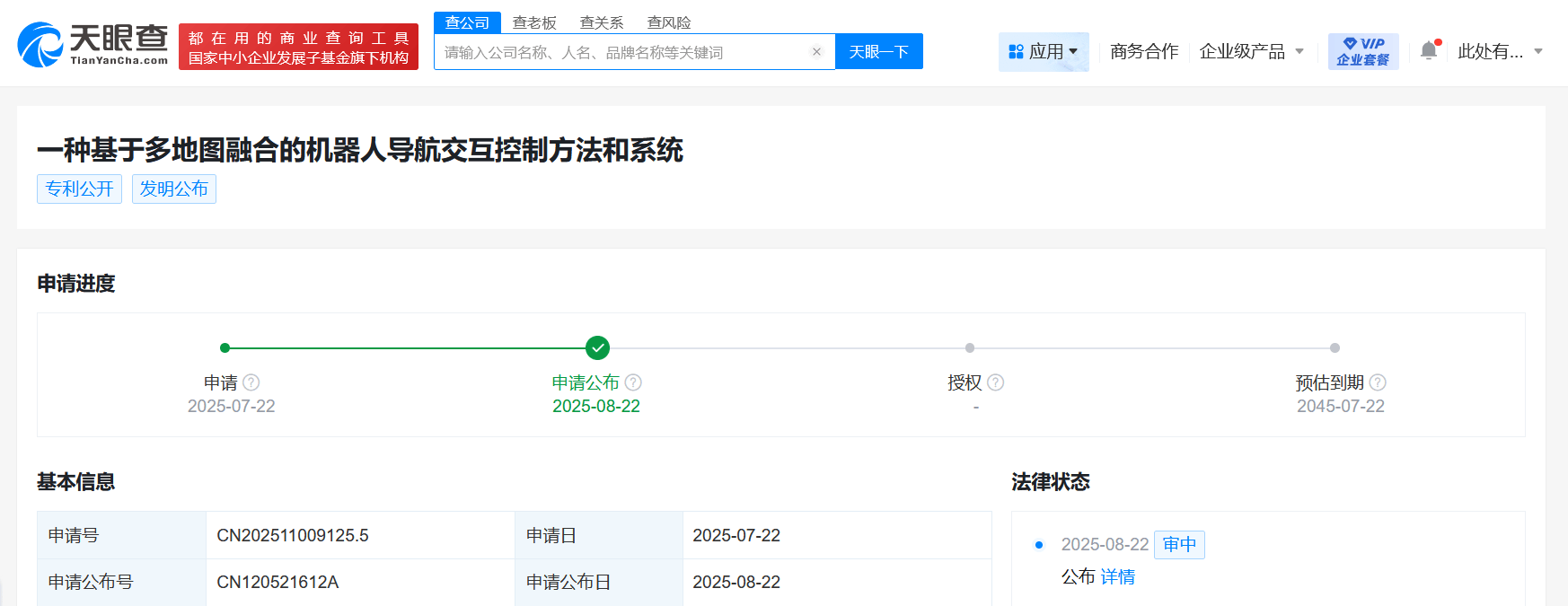
杭州宇树科技近日在机器人导航技术上取得了新突破,一项名为“基于多地图融合的机器人导航交互控制方法和系统”的专利被正式公布。
据悉,该专利针对现有机器人导航方案在跨场景导航上的不足,提出了一种创新的解决方案。传统的导航方法在面对跨区域导航时,常常因为缺乏有效的跨场景机制而导致导航不准确。而宇树科技的这一发明,则是通过融合多个点云文件,基于场景间的拓扑关系,构建出一个完整的跨场景地图。
在有了这个跨场景地图的基础上,系统能够根据跨场景导航任务进行路径规划,生成导航数据,从而实现了高效、可靠且易用的跨场景导航机制。这一创新不仅解决了机器人在复杂环境下的导航难题,也大大提高了机器人在工作巡检中的效率。
该专利的公布,标志着宇树科技在机器人控制技术领域迈出了重要的一步,同时也为机器人导航技术的发展提供了新的思路和方向。