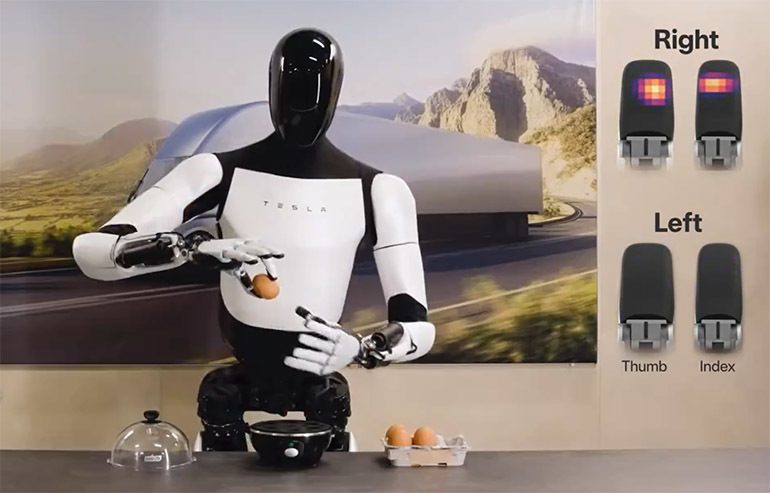
特斯拉在人形机器人Optimus训练中采用新策略,摒弃动作捕捉服与VR
近日,据《商业内幕》披露,特斯拉在自动驾驶技术领域的纯视觉方案如今被应用到了其人形机器人Optimus的训练上。这一转变标志着特斯拉在机器人发展战略上的重大调整。
据知情人士透露,特斯拉已于6月底向内部员工传达了这一新策略,未来将更加专注于通过纯视觉方案推进Optimus的训练。此前,特斯拉曾使用动作捕捉服和虚拟现实头显记录人类操作员的数据,并以此远程操控机器人。而现在,特斯拉计划主要通过录制员工执行任务的视频来训练机器人,让其学习如何完成如拾取物体或折叠衣物等动作。
特斯拉方面表示,放弃动作捕捉服和远程操作将使团队能够更快速地扩大数据收集规模。这一转变与特斯拉长期以来在自动驾驶系统上采用的方法相一致,即依靠摄像头捕捉的数据来训练AI系统。
然而,这一新策略打破了行业训练机器人的常规。远程操作和动作捕捉通常是训练机器人的标准做法,例如波士顿动力就曾使用这种方法训练其Atlas机器人。对于特斯拉的这一转变,有专家表示担忧,认为仅依靠视频数据可能难以让机器人将视频内容转化为现实世界的动作。
不过,特斯拉负责Optimus硬件研发的总监康斯坦蒂诺斯·拉斯卡里斯似乎对这一新策略充满信心。他在领英上发文称:“我们的机器人正在通过人类视频直接学习新任务!”而特斯拉创始人埃隆·马斯克也表示,Optimus最终将能够通过观看YouTube视频学习执行任务。

据悉,在训练方式转变后,特斯拉员工开始使用安装在头盔和背包上的摄像头记录自身动作,为AI模型提供精确的环境定位数据。这些摄像头向各个方向拍摄,能够捕捉到更精细的细节,如关节和手指的位置,从而实现机器人的空间精准定位。
然而,这一新策略也带来了新的挑战。执行训练任务的工作人员需要确保动作尽可能接近人类形态,有些员工甚至需要花费数月时间重复执行同一个简单动作。特斯拉还需要想办法教会Optimus使用可应用于多种任务的动作,以建立通用动作库,避免逐个训练所有动作耗费无穷的时间。
尽管面临诸多挑战,但特斯拉似乎对这一新策略充满信心。有专家表示,这是非常符合特斯拉风格的机器人开发方式,没有其他公司在同等规模上尝试这样做。然而,也有专家指出,对于特斯拉来说,训练Optimus将比开发自动驾驶汽车更加艰巨。因为驾驶只是单一任务,而机器人需要理解视频中发生的情况,并具备完成任务的技能。
截至目前,特斯拉尚未就此置评。然而,随着特斯拉在Optimus训练上的不断探索和尝试,我们有理由相信,这一新策略或将为特斯拉在机器人领域的发展带来新的突破和进展。