在自动化制造领域,多个机械臂如何在充满障碍物的共享空间中高效协作、避免碰撞,一直是困扰业界的难题。如今,一项发表于《科学·机器人学》(Science Robotics)的新研究,为这一难题提供了创新解决方案——由DeepMind、Intrinsic AI和伦敦大学学院等机构联合开发的“机器芭蕾”(RoboBallet)系统,通过将图神经网络(GNN)与强化学习结合,实现了多机械臂的协同运动规划。
研究团队介绍,传统方法在处理多机器人任务分配、调度和运动规划时,需分别解决三个子问题:任务分配需决定“谁做哪项任务”;任务调度需确定“任务执行顺序”;运动规划则需在关节空间中寻找无碰撞路径。这三个问题相互交织,导致计算复杂度呈指数级增长,工业界目前仍依赖人工规划,效率低下且成本高昂。
RoboBallet的创新之处在于,它将整个场景建模为图结构:机器人、任务和障碍物作为节点,节点间的关系(如相对位置)作为边。例如,机器人节点间存在双向边以支持避碰协调,任务和障碍物节点到机器人节点则存在单向边,用于传递环境信息。这种图结构表示,使系统能够动态适应不同数量的机器人和任务。
在算法层面,RoboBallet采用图神经网络作为策略网络,通过权重共享处理不同规模的图输入。系统以观测图为输入,在每个时间步为所有机械臂生成关节速度指令,使其仅凭原始状态输入即可完成关系推理。为解决稀疏奖励问题,研究团队引入了“事后经验回放”(Hindsight Experience Replay)方法,使模型无需人工设计奖励函数即可高效学习。
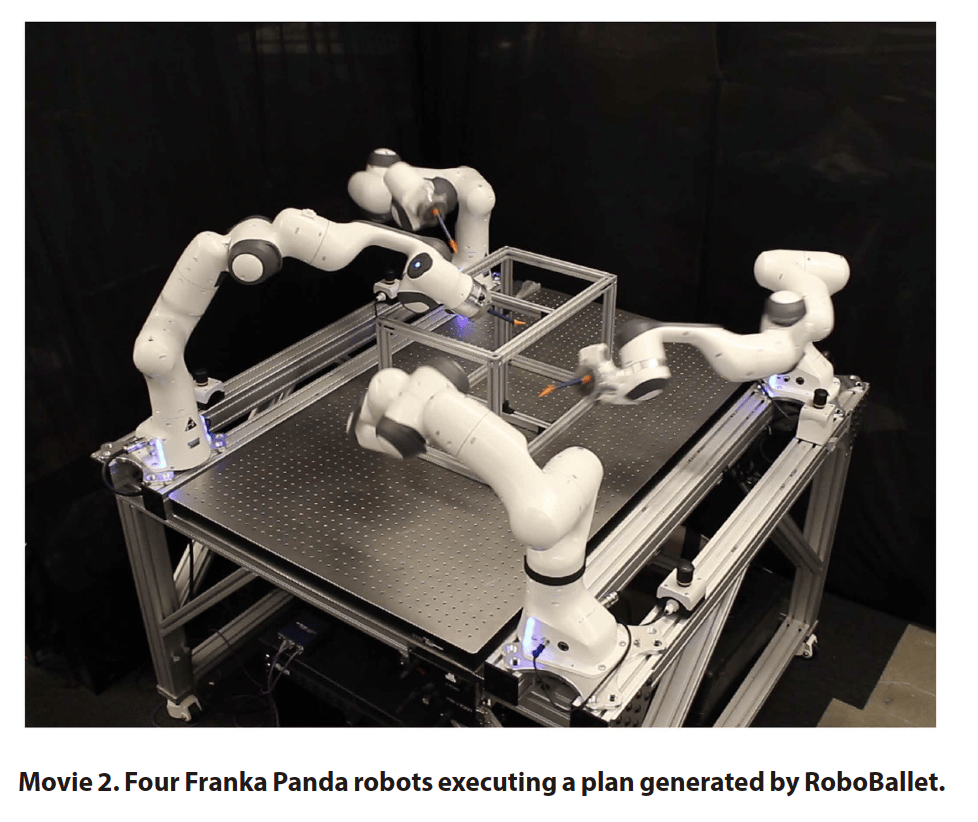
实验中,研究团队在模拟环境中部署了4至8个Franka Panda七自由度机械臂,测试场景包含40个任务和30个障碍物。与经典RRT-Connect算法对比显示,RoboBallet在多个关键指标上表现优异:在训练扩展性方面,任务数量增加四倍时,收敛所需训练步数仅略有增加;在规划速度上,8个机械臂和40个任务的最大场景中,每个规划步在NVIDIA A100 GPU上仅需0.3毫秒,在单核CPU上约需30毫秒,均远超实时需求;在协同效率上,机器人数量从4个增至8个时,平均执行时间减少约60%。
更引人注目的是,RoboBallet展现了强大的零样本泛化能力。模型在随机生成的环境中训练后,可直接迁移至具有不同机器人位置、障碍物形状和任务姿态的新环境,无需额外训练。这种特性使其能够应用于工作单元布局优化(任务执行时间缩短33%)、容错规划和基于在线感知的重新规划等场景。
研究团队指出,RoboBallet的高速和可扩展性,为自动化制造提供了新的技术路径。其每步0.3毫秒的规划速度,足以支持10Hz时间步下的实时控制,而单GPU即可完成所有计算,显著降低了部署成本。未来,这一技术有望进一步推动智能制造的发展。