近期,同济大学等机构的研究团队在《汽车工程》杂志2025年第5期中发表了一项引人注目的研究成果,聚焦于狭窄环境下的安全泊车路径规划算法。该研究针对自动泊车系统面临的安全、实时性和可行性挑战,提出了一种创新的解决方案。
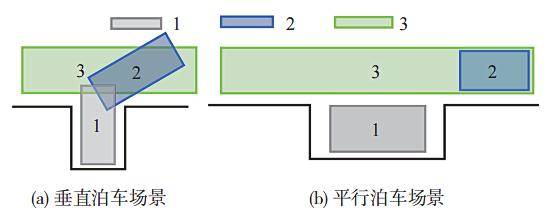
随着城市车辆密度的不断增加,狭窄拥挤的泊车环境成为驾驶者的一大困扰。自动泊车系统通过智能感知和自主规划路径,为解决这一问题提供了希望。然而,安全高效的泊车路径规划技术仍然面临诸多难题,包括在复杂场景下的无碰撞路径规划、实时性不足以及路径可执行性差等问题。现有的路径规划方法,如几何曲线法、启发式搜索和强化学习,各有优缺点,但难以满足狭窄、不确定性泊车场景的需求。
为了克服这些挑战,研究团队开发了一种基于混合动作空间约束强化学习(HCRL)的泊车路径规划算法。该算法将泊车的最优安全路径规划问题转化为混合动作空间的安全策略优化问题,通过结合离散动作和连续参数,实现了满足车辆运动学特性的参数化轨迹规划,从而提高了路径的可执行性。
在算法设计中,研究团队还引入了一种课程学习机制,通过逐步增加泊车难度来引导策略更新。这一机制不仅提高了模型训练的稳定性,还显著加快了算法的收敛速度。为了验证算法的有效性,研究团队在垂直车位和平行车位上进行了广泛的对比和消融实验。
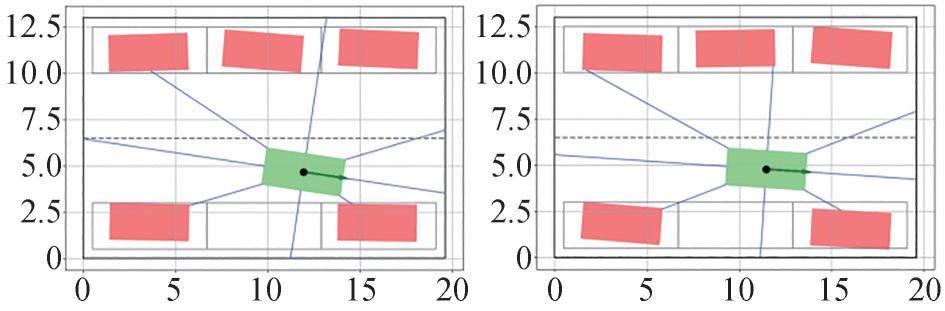
实验结果表明,所提出的HCRL算法在成功率、安全性和实时性等关键指标上均表现出色,综合性能明显优于现有的基线算法。特别是在狭窄车位场景下,HCRL算法仍然能够完成安全、高效的泊车路径规划。通过与常用泊车路径规划算法的对比,HCRL算法所规划的路径不仅完美避开了周围停泊的车辆,还以较短的时间完成了整条路径的规划。
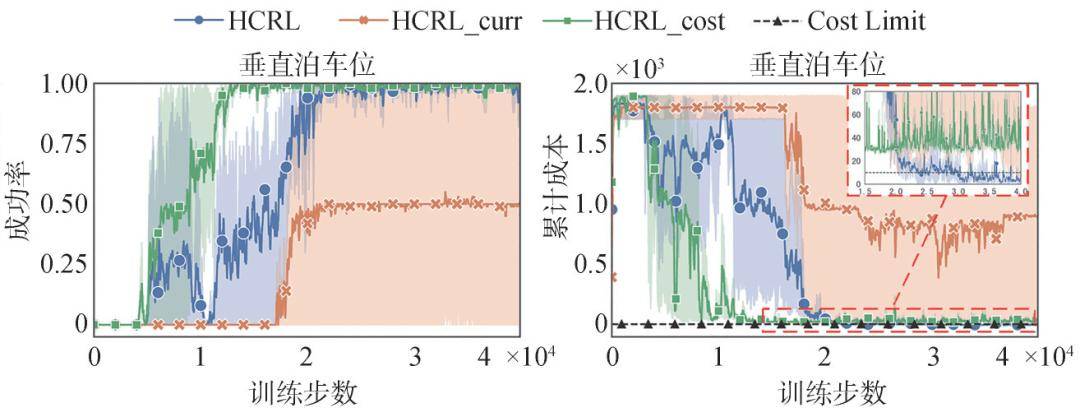
为了进一步展示HCRL算法的优势,研究团队还进行了消融实验,分别测试了安全约束策略和课程学习对算法性能的影响。实验结果表明,安全约束策略和课程学习在HCRL算法中均发挥着关键作用,两者的结合使得算法能够以更高的成功率和更低的安全成本完成泊车任务。
这一研究成果不仅为狭窄环境的安全泊车路径规划提供了理论支持和技术保障,还具有重要的实际应用价值。随着自动泊车技术的不断发展,HCRL算法有望在未来得到广泛应用,为驾驶者提供更加便捷、安全的泊车体验。