在智能制造日益盛行的当下,人机协同作业的场景愈发普遍,但随之而来的安全问题也逐渐凸显。当工人与机器人在生产线上并肩作战时,如何确保工人的安全成为了亟待解决的难题。近日,在第二届雄安未来之城场景汇雄安国际机器人大赛上,一个名为“数字孪生驱动的人机协作安全距离快速感知系统”的项目,为这一难题提供了创新的解决方案。
该项目凭借48毫秒的超快响应速度、无需外挂设备即可实现360度无死角安全防护以及低至2万元的部署成本,成功吸引了众人的目光,并荣获大赛一等奖。这一突破性成果,不仅重新定义了工业场景下人机协作的安全标准,更为智能制造的未来发展开辟了新的道路。
该项目由北京邮电大学智能工程与自动化学院教授褚明领衔的团队研发。褚明指出,尽管机器人能够高效完成重复性、高强度的任务,但其智能水平远未达到与人类真正协同共处的程度。在早期工业应用中,机器人甚至需要被铁丝网隔离,以确保人员安全。然而,随着技术的不断发展,人机共存已成为智能制造的新常态,但安全防护体系仍面临严峻挑战。
传统的人机安全监测主要依赖激光雷达、红外和声波测距等技术,但这些技术都存在明显缺陷。例如,激光雷达虽然能全向覆盖,但响应速度慢且成本高昂;声波测距则只能测量到正面相对的区域,存在监测盲区。这些设备几乎都需要外挂在机器人上,不仅影响工作的灵活性,甚至可能带来新的安全隐患。因此,褚明团队决定另辟蹊径,将数字孪生技术与计算机视觉深度融合。
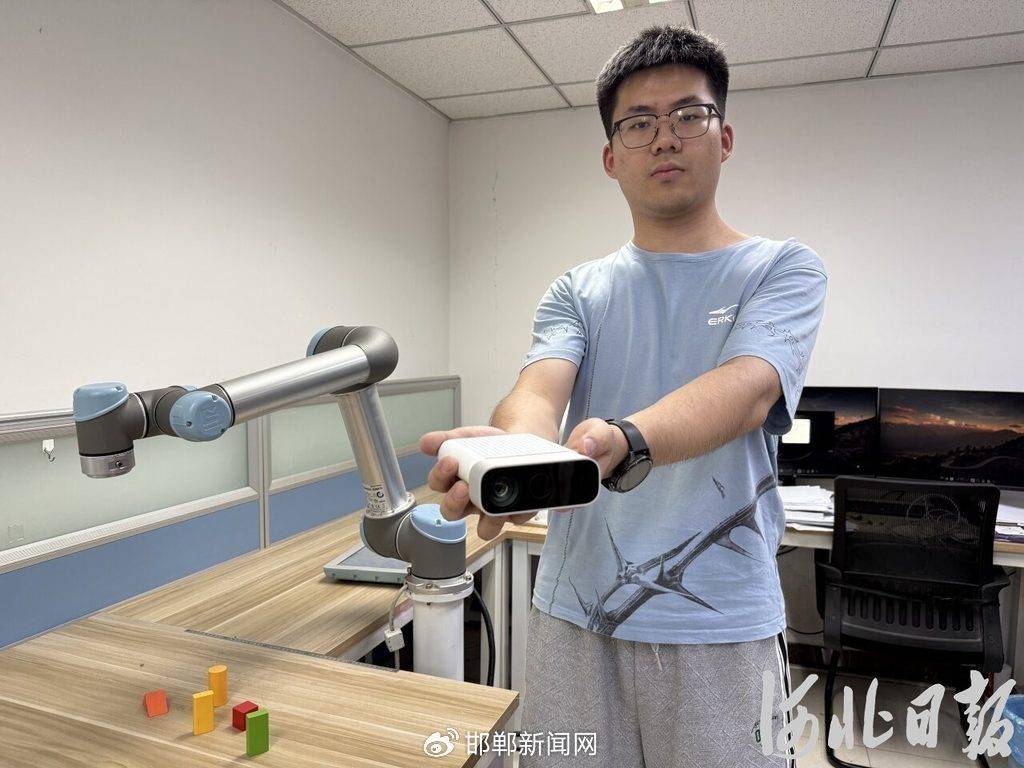
他们利用深度相机实时捕捉人体和机械臂的动态数据,并在虚拟空间中构建极简主义的骷髅级交互模型。通过算法实时计算碰撞风险,实现从感知到防护的无缝衔接。这种高度简化的建模方式,大大降低了系统数据计算量,有效提升了数字孪生场景的构建效率,为毫秒级实时响应提供了关键技术保障。

在展示现场,记者亲身体验了这一系统的安全防护能力。无论记者如何变换动作和距离,系统都能实时测量出人与机械臂之间的最短距离,并根据距离数据向机器人发出相应的预警指令。随着距离数据的变化,机械臂或减速运行,或瞬间停止,始终与记者保持着安全距离。
除了反应迅速、安全防护无死角外,该系统还具有成本低、部署快的优势。据褚明介绍,系统的部署极其简单,就像安装普通监控摄像头一样便捷。每个定焦深度相机可精准覆盖6米远的范围,单个6米远监控区域的部署成本仅2万元。这一优势使得该系统在制造企业中备受青睐。
在采访中,一家焊接机器人企业的负责人向褚明坦言,他们正面临严峻的人机协作安全挑战。在自动化焊接产线上,虽然核心焊接工序由机械臂完成,但上下料环节仍需人工介入。工人频繁进出作业区域时,既要防范机械臂的意外碰撞,又要躲避飞溅的高温焊渣,安全风险居高不下。而这套系统的出现,无疑为这类企业提供了有效的解决方案。
褚明表示,他们希望通过这次大赛,让这项技术接受市场的真实检验,看它是否能切实解决企业的安全生产痛点。同时,他们也在持续深化人机共存领域的研究,推动人机协作向更高层级发展。未来,他们希望机器人不仅能感知人的存在,更能理解人的意图,实现人机共融的美好愿景。