
在NVIDIA GTC 2026大会上,理想汽车基座模型负责人詹锟发表了题为《MindVLA-o1:开启全能范式 —— 下一代统一视觉-语言-动作自动驾驶大模型探索》的主题演讲,正式推出其新一代自动驾驶基础模型MindVLA-o1。这一突破性成果标志着自动驾驶技术向物理世界智能迈出了重要一步。
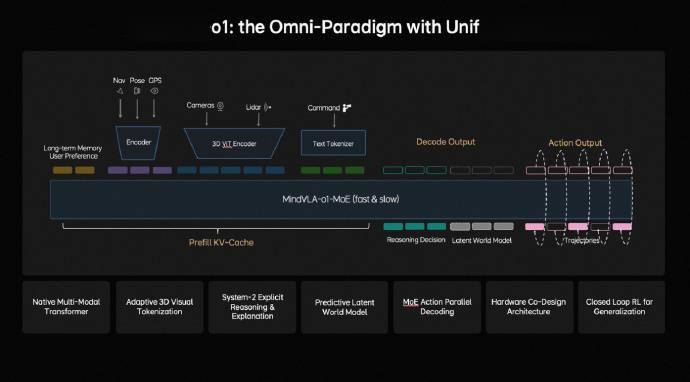
MindVLA-o1的核心创新体现在五大技术维度。在3D空间理解方面,该模型突破了传统二维图像处理的局限,通过融合摄像头与激光雷达数据,构建出三维编码器系统。这一技术使车辆能够精准感知物体的深度、距离及运动轨迹,实现与人类驾驶员相似的三维空间认知能力,为复杂路况下的决策提供可靠依据。
多模态思考能力是该模型的另一大亮点。基于隐世界模型架构,MindVLA-o1具备"预演未来"的独特功能。系统不仅能实时分析当前场景,还能在虚拟空间中模拟未来数秒可能发生的多种情况,从而提前制定最优应对策略。这种前瞻性思维模式显著提升了自动驾驶系统的决策质量与安全性。
在行为生成层面,VLA-MoE架构的引入实现了行驶轨迹的统一优化。系统配备的"动作专家"模块可同步生成所有轨迹点,并通过类似信号去噪的优化算法,确保车辆运动既符合物理规律又保持平稳流畅。这种设计有效解决了传统方案中轨迹规划与执行脱节的问题。
训练效率的革命性提升得益于闭环强化学习技术。理想汽车构建的世界模拟器为模型提供了虚拟训练场域,使系统能够在虚拟环境中进行海量场景练习与策略优化。这种训练方式不仅大幅降低了现实道路测试的成本与风险,更将模型迭代速度提升了数个量级。
软硬件协同设计突破了模型部署的技术瓶颈。通过精确平衡模型精度与硬件延迟,研发团队将架构设计周期从数月压缩至数天。这种高效设计确保了复杂大模型能够在车端芯片上稳定运行,为自动驾驶系统的量产落地扫清了关键障碍。











