在自动驾驶辅助技术的赛道上,两大阵营正悄然形成。一方是以特斯拉为先锋的视觉主导派,它们大胆舍弃了除摄像头以外的所有传感器,这一激进策略已吸引了一批追随者。而另一边,则是由华为、理想等企业构成的融合感知阵营,它们坚定地以激光雷达为核心,构建了自动驾驶的感知体系。
在这两大阵营的交锋中,小鹏汽车的选择尤为引人注目。它曾一度是激光雷达的拥趸,但如今却转向了视觉方案。针对这一转变,小鹏汽车自动驾驶产品的高级总监袁婷婷近日给出了她的见解。
袁婷婷直言不讳地指出,激光雷达的远距离探测能力其实是一个被夸大的概念。她解释说,激光雷达作为主动传感器,通过发射近红外光并接收反射回波来计算飞行时间(ToF),进而感知障碍物。然而,随着距离的增加,激光束的发散角会扩大,导致能量密度急剧下降。这意味着,在远距离时,激光雷达获取的回波信号强度和点云密度都会大打折扣。
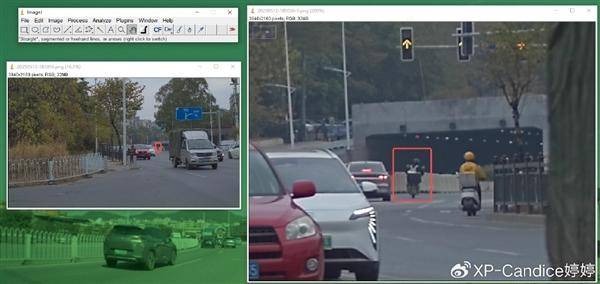
为了佐证这一观点,袁婷婷以行业领先的192线激光雷达为例,对比了它在200米外获取的信息与800万像素摄像头的信息。她强调,对于自动驾驶系统来说,能够准确区分远距离的物体至关重要,比如区分一个轻飘飘的塑料袋和一个快速移动的电瓶车。而在这方面,高分辨率摄像头无疑更具优势。
袁婷婷还提到了激光雷达的多径效应和低帧率问题。多径效应会导致信号失真或误识别,而低帧率则会让远距离且高速移动物体的识别误差进一步加剧。她指出,业界主流的激光雷达处理帧率远低于摄像头的帧率,这无疑限制了其在自动驾驶中的应用。

袁婷婷进一步指出,激光雷达对天气状况非常敏感。在近红外光波长较短的情况下,遇到雨雪雾等极端天气时,激光雷达会在传感器附近形成噪点,且无法穿透这些透明障碍物看到后面的目标。相比之下,毫米波雷达则具有更好的衍射性和雨雾特性,因此在恶劣天气下更具优势。
在袁婷婷看来,激光雷达作为一个信息密度低且易受干扰的传感器,并不适合作为自动驾驶系统的主要感知手段。她认为,一个强大的自动驾驶系统需要的是一个能够准确、稳定地获取环境信息的感知体系,而在这方面,视觉方案无疑具有更大的潜力。
袁婷婷的这番言论无疑为自动驾驶领域的技术路线之争增添了新的火药味。然而,无论最终哪条路线能够胜出,都离不开技术的不断创新和突破。在这个过程中,我们期待看到更多像小鹏汽车这样的企业能够勇于尝试、敢于创新,为自动驾驶技术的发展贡献自己的力量。