近期,特斯拉在其官方社交媒体平台上再度强调了视觉处理方案的重要性,并宣称此方案将使得安全智能的产品更加亲民。特斯拉的这一立场,无疑为其在智能驾驶领域的纯视觉技术路线再添一把火。
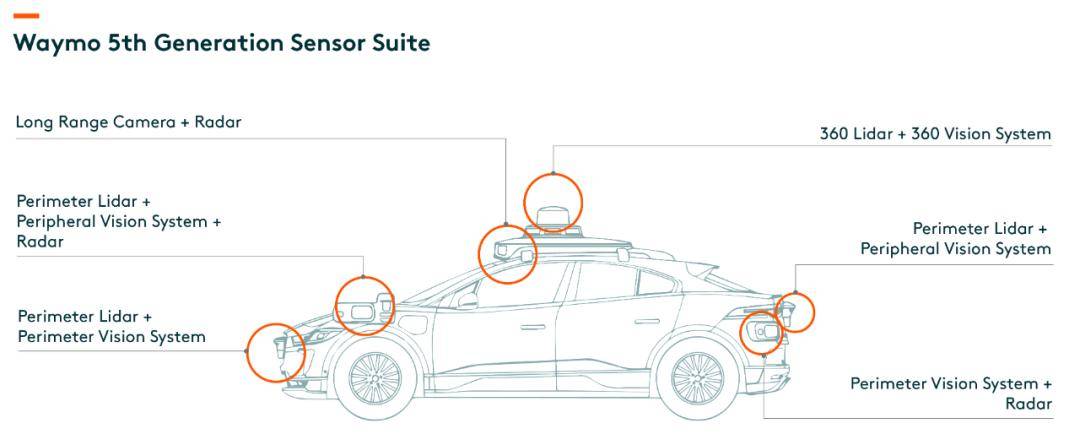
回溯至上个月,特斯拉CEO埃隆·马斯克通过其个人社交平台透露,特斯拉即将推出基于纯人工智能技术的“通用型全自动驾驶(FSD)解决方案”。这一方案将延续特斯拉自2016年以来坚持的“视觉优先”策略,摒弃激光雷达,仅凭摄像头和自研芯片便可实现L4至L5级别的自动驾驶。
然而,与特斯拉全力押注纯视觉方案形成鲜明对比的是,激光雷达市场正蓬勃发展。据国际市场研究与战略咨询机构Yole Group发布的《2025年全球车载激光雷达市场报告》显示,全球乘用车激光雷达市场正以惊人的速度增长,预计2024年市场规模将同比扩增68%,达到6.92亿美元。截至2025年3月底,中国市场已有94款搭载激光雷达的车型上市,数量较上一年度翻倍。
禾赛科技的CEO李一帆在技术开放日上表示,车载激光雷达正逐渐从“可选配置”转变为“必备安全组件”。同时,经过约8年的努力,激光雷达的成本已大幅下降99.5%,从数千美元降至约200美元。
在智能驾驶辅助领域,激光雷达与纯视觉的路线之争由来已久,至今仍未有定论。无论是仅依赖摄像头的“纯视觉派”,还是采用激光雷达、毫米波雷达和摄像头相结合的“多传感器融合派”,这场争论的本质在于技术理念、成本逻辑与市场策略的深刻博弈,预示着智能驾驶辅助技术路线的竞争将进一步升级。
特斯拉在其声明中指出,公司的视觉处理方案结合端到端神经网络架构,已通过数十亿真实世界数据样本的训练,成功实现了多场景下的安全智能驾驶。特斯拉的这一表态,进一步明确了其在智能驾驶辅助领域的技术选择与战略定位。与业内其他依赖多传感器融合方案的企业不同,特斯拉坚信“先进的技术无需依赖昂贵复杂的传感器”。
特斯拉的FSD智能驾驶辅助系统是目前世界上唯一采用纯视觉方案的系统,甚至摒弃了毫米波雷达,仅依靠摄像头和AI系统。马斯克曾表示,自动驾驶汽车应模仿人类司机的驾驶方式,依靠视觉和智力驾驶,特斯拉的纯视觉方案正是基于这一理念。
马斯克认为,道路和交通规则是基于人类视觉设计的,因此纯视觉方案最能贴近人类驾驶习惯,是实现完全自动驾驶的“第一性原理”。他多次批评激光雷达是“错误的解决方案”,指出其在复杂道路环境中效率低下,而视觉系统结合生物神经网络才是最优解。特斯拉采用纯视觉方案,是为了让车载计算机更加“专注”,避免冗余数据对软件产生负面影响。
从技术角度看,纯视觉方案基于摄像头感知系统,通过摄像头捕捉环境的RGB图像数据,利用深度学习算法提取语义特征,完成环境感知、识别和决策。这一方案的核心在于以算法为驱动,模拟人类视觉系统理解复杂驾驶场景。
然而,纯视觉方案也面临诸多挑战。一方面,它依赖算法对场景的高效感知与理解,在恶劣天气和复杂光照条件下,如何确保可靠性是其核心挑战之一。另一方面,该方案需要处理大量图像数据,对自动驾驶系统的数据处理和存储能力提出了更高要求。
相比之下,国内虽然也有企业宣称采用纯视觉方案,但实际上是“主视觉”方案,除了摄像头外,仍保留了其他传感器,只是去除了激光雷达。中国车企更擅长结合中国实际道路环境开发智能驾驶辅助技术,针对“鬼探头”“加塞”等常见情况,都有针对性的解决方案。
自动驾驶的核心技术包括环境感知、精确定位、路径规划和线控执行。在实际驾驶中,自动驾驶汽车需要准确识别周边环境,尤其是实时动态环境数据。环境感知通过摄像头、传感器和雷达对周围环境进行监控和信息获取,完整的环境感知方案需要多方信息协调。
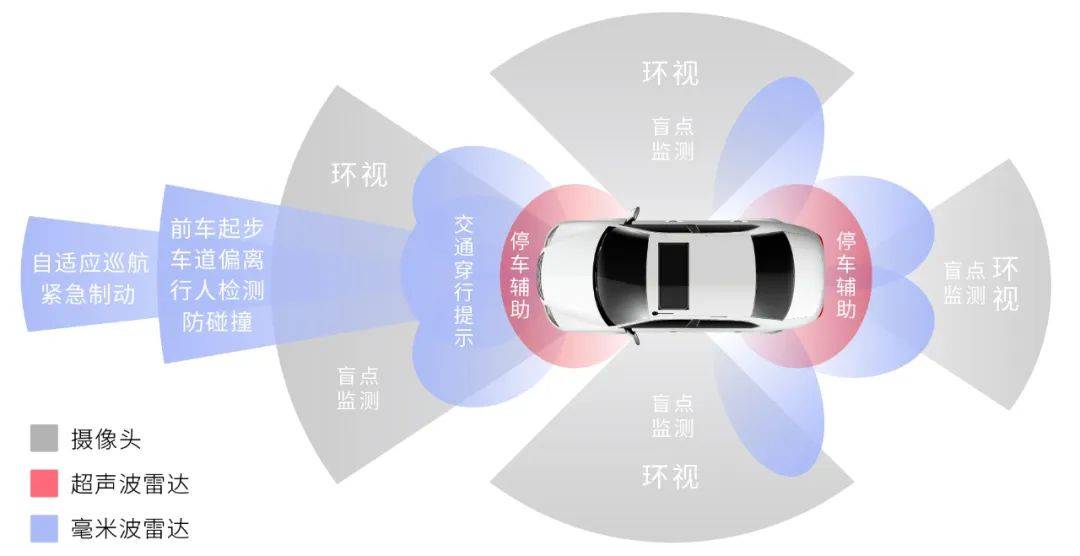
感知系统的实现依赖于传感器数据采集、特征提取、数据融合和语义分析等技术模块的协同运作。数据采集是感知系统的起点,通过激光雷达、摄像头、毫米波雷达和超声波雷达等传感器的协作,感知系统能够覆盖从远距离到近距离的全方位感知需求。
激光雷达以其高精度测距能力,能够精确感知周围环境中的物体位置、形状和距离,被广泛应用于构建环境几何模型。摄像头则能捕获丰富的语义信息,用于识别车道线、交通标志等。毫米波雷达在感知速度和距离信息方面表现优异,而超声波雷达则更多应用于泊车场景中的障碍物检测。

为了克服单一传感器的局限性,多传感器组合已成为自动驾驶的主流解决方案。激光雷达与摄像头的融合感知方案,能够提升全局信息获取能力,为行驶安全提供多重保障。以华为、理想汽车为代表的企业是激光雷达的坚定支持者。
理想汽车CEO李想在一次对话节目中表示,保留激光雷达是为了安全。他举例说,在中国深夜驾驶时可能会遇到尾灯损坏的大货车停在主路上,激光雷达能在200米外发现,而摄像头在无光环境下可视距离只有100多米。激光雷达能实现更远距离的探测,对物体的检测更灵敏,在高速场景下保证更高的刹停速度,在城区里则有效降低误报率。
特斯拉与国内车企的路线分歧,本质上是“算法驱动”与“硬件驱动”的理念之争。特斯拉押注于通过海量数据训练出“全能算法”,实现无雷达的纯视觉自动驾驶;而国内车企则选择用硬件堆砌安全冗余,通过多传感器互补应对复杂场景。
然而,单一技术的安全威胁在于安全冗余能力不足。视觉可能“看不见”,激光雷达可能“看不懂”。在真实场景中,大雾可能让视觉系统失效,反光物体可能让激光雷达误判。因此,融合感知技术成为解决之道。通过将激光雷达、摄像头、毫米波雷达等多种传感器的感知数据进行融合处理,提供更准确、完整的环境信息。
虽然特斯拉不断为纯视觉路线摇旗呐喊,但目前纯视觉路线仍未成为智能驾驶的终局。出于安全的考虑,激光雷达还远未到被淘汰之时。从国内技术能力出发,现阶段要实现去激光雷达还有难度。特斯拉之所以捍卫纯视觉路线,是基于其在数据、算力与算法三方面的巨量投入。
在考虑成本时,不能仅看硬件成本,还要考虑背后的研发服务和资源投入,即“全成本”。特斯拉构建的门槛和壁垒极高,其他企业难以简单复制。随着激光雷达可靠性和成本的改善,越来越多的车企选择将其应用于高阶智能驾驶辅助系统。
智能辅助驾驶正从早期试点迈向规模化普及阶段,需要技术创新与用户体验的平衡共进。智能辅助驾驶的行业终局尚未明晰,但安全始终是不可逾越的底线。在关乎生命安全的领域,构建可靠的技术体系,让用户在每次出行中感受到可信赖的技术守护,才是智能驾驶辅助技术普惠大众的正确方式。