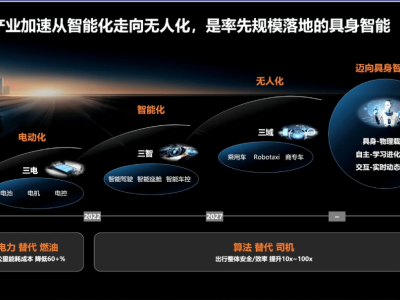
在探讨人形机器人与具身智能的落地应用时,专家指出,人形机器人不应仅仅模仿人类形态,而应彻底重构操作范式。只有当这些机器人学会用身体“适应”世界,工业4.0才能真正实现柔性生产力的飞跃。2025年,被视为人形机器人商业化元年的关键节点,中国的人形机器人企业正面临严峻考验:它们能否承担起走进工厂的重任,实现从理论到实践的跨越?
近日,从即将举行的上海世界人工智能大会(WAIC)传来消息,赛博格机器人公司将全球首发其Cyborg-R01全尺寸人形机器人及超轻量灵巧手Cyborg-H01。这两款新品旨在利用多触点协同控制、三维空间感知、仿生节能架构等核心技术,向高危高负荷的工业场景发起挑战,试图让双足机器人成为真正的生产力工具。
Cyborg-R01人形机器人身高180cm,具备62个自由度,双臂负载能力达20公斤,续航4小时,是专为高危高负荷场景设计的工业破局者。它能稳稳搬运20kg的不规则部件穿过复杂地形,这种鲁棒且灵活的处理能力令人印象深刻。赛博格机器人研究发现,人类在执行任务时能调动全身,而传统轮式机器人和机械臂则受限于底盘高度和机械臂自由度。因此,Cyborg-R01试图复刻人类的作业流程,从“单手受力”向“全身发力”进化。

为了实现这一进化,赛博格机器人开发了多模态OMCI智能中枢——自研车规级“博脑”中枢。该中枢以触觉融合的全身协同控制算法为核心,增强了机器人任务完成的稳定性与响应速度。在搬运大件重物时,Cyborg-R01能像人类一样调动肩、胸、膝等部位协同承力,实现“四两拨千斤”的物理直觉,有效分担局部载荷,降低关节电机峰值负载,提升整机寿命。
赛博格机器人还采用了航天级拓扑优化设计技术,使Cyborg-R01的机身重量降低62.5%,同时负载能力提升50%。借助足底的六维扭力感知能力传感阵列,该机器人支持坡度地形自适应,能实现7.2km/h的高速步态与全地形部署兼容。在自研“博脑”中枢的驱动下,Cyborg-R01不仅能实现实时空间环境建模与动态定位,还能在未知高危高负载环境下做出实时决策与运动控制,确保全身协同作业的可靠性。
除了人形机器人,赛博格机器人还将发布全栈自研的超轻量灵巧手CYBORG-H01。这款灵巧手基于人体仿生学设计,采用5指节16自由度的方案,结合多模态融合感知技术和欠驱动筋腱传动结构,具备对形状不规则物体的自适应抓取能力。其内部藏有6个微型电机,以高强度纤维绳驱动指节,自锁机构抓握即锁定,使用功耗直降60%。CYBORG-H01还可搭载触觉、视觉及关节位置传感器,实现对物体接触状态、环境状态及自身形位状态的精准感知,让人形机器人的抓取姿态更加灵活。

赛博格机器人自2024年7月成立以来,已集结了一支由世界顶尖科学家领衔的独特团队,涵盖机器人本体设计、AI软件算法开发及工程化落地等领域的顶尖人才。在短短一年内,该公司便斩获了深圳市“科技型重点孵化企业”称号,其自研的“博脑”端到端VLA2.0架构也荣获2025年度LeadeRobot人形机器人技术突破奖。本次WAIC大会上,赛博格机器人将展示其两款新品,期待在高危高负荷场景下重塑工业生产力的版图。