特斯拉首席执行官埃隆・马斯克近日就无监督完全自动驾驶(FSD)技术所需的关键训练数据量作出最新判断。他指出,由于现实交通场景中存在大量罕见且复杂的边缘情况,要实现真正安全的无监督自动驾驶系统,至少需要积累100亿英里(约合160.93亿公里)的行驶数据。这一数字远超行业此前普遍预期,凸显出自动驾驶技术落地的现实挑战。
该论断源于马斯克对苹果前自动驾驶工程师保罗・拜塞尔分析文章的回应。拜塞尔在社交平台撰文指出,特斯拉通过海量真实道路数据构建的"数据飞轮"已形成显著竞争优势,其他企业难以在短期内复制这种规模效应。他特别强调:"自动驾驶不是技术演示竞赛,而是涉及数据规模、处理能力和迭代效率的系统工程。特斯拉在这个维度已经建立代际优势,而多数竞争对手仍处于概念验证阶段。"
马斯克在转发该文时补充道:"现实世界的长尾分布特性远超想象,100亿英里只是基础门槛。"值得注意的是,这一数字较其2020年《宏图计划2.0》中提出的60亿英里监管审批标准又有显著提升,反映出技术团队对问题复杂性的认知深化。特斯拉人工智能副总裁阿肖克・埃勒斯瓦米随后也发文呼应,称"最后5%的边缘场景处理难度是前95%的十倍以上"。
公开数据显示,特斯拉FSD系统正以惊人速度积累测试里程。截至2025年底,该系统全球累计行驶里程已突破70亿英里大关,其中城市复杂道路场景占比超过35%。特别在最近两周内,系统里程数从69亿激增至70亿,日均增量达5000万英里。这种指数级增长态势,使其训练数据储备量可能达到行业第二名的三倍以上。
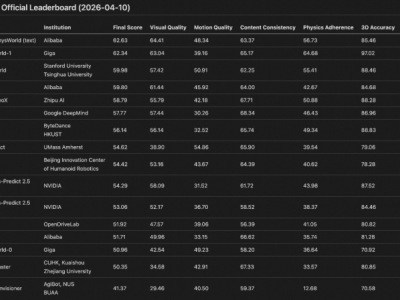
在技术实现路径上,马斯克近期多次强调真实数据与仿真测试的互补关系。他在评价英伟达Alpamayo自动驾驶项目时直言:"达到99%的完成度很容易,但剩余1%的极端场景处理才是真正考验。"这种观点与拜塞尔的分析形成呼应,共同指向自动驾驶技术发展的核心矛盾——如何用有限计算资源覆盖无限可能的现实场景。
行业分析师指出,特斯拉的数据优势不仅体现在总量,更在于其结构化数据质量。通过8个车载摄像头组成的360度感知系统,每辆特斯拉每天可产生超过1TB的原始数据,经过筛选标注后,有效训练样本量呈指数级增长。这种独特的数据采集模式,配合Dojo超级计算机的分布式训练架构,正在重塑自动驾驶技术的研发范式。