在人工智能领域,一场革命性的转变正在悄然发生。传统机器人,尽管技术日益精进,却依然难以达到人类在处理工具时的直觉与流畅。就像一位熟练的木匠在使用锤子时,锤子仿佛消失了一般,成为身体的一部分,而机器人却仍在每一次交互中“重新拿起”工具,这种割裂式的处理方式限制了AI的进一步发展。
自变量机器人团队提出了一种全新的观点:要实现真正的具身智能,不能仅仅对现有基于视觉-语言的基础模型进行修补,而需要进行一场彻底的架构革命。他们主张放弃以“多模态模块融合”为核心的拼凑式范式,转而采用一个端到端的统一架构。
这一统一架构的核心在于消解视觉、语言和行动之间的人为边界,将它们视为单一信息流进行处理。现有主流方法将不同模态视为独立模块,通过融合层进行连接,但这种“委员会”式的设计存在表征瓶颈和无法涌现的问题。信息在传递过程中会产生压缩损失,且模型难以学习到跨越模态的直觉式因果规律。
自变量机器人提出的统一模态架构则旨在解决这些问题。该架构的核心是统一表示学习,将所有模态信息——视觉、语言、触觉、动作——转换为共享的高维token序列,从而消除模态间的人为边界。关键突破在于采用多任务多模态生成作为监督机制,迫使模型建立起深层的跨模态对应关系。
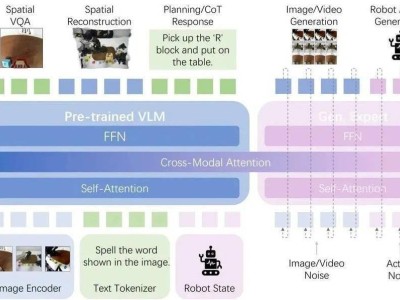
在这一架构下,所有输入模态通过各自的编码器转化为统一的token序列,并被送入一个Transformer核心。预训练多模态理解模型负责整合信息以完成空间感知理解与任务推理规划,而生成专家则预测未来的图像与视频,并直接生成可执行的机器人动作。两者通过跨模态注意力层深度耦合,实现了感知、推理和行为的无损双向交互与共同演进。
这种统一架构的优势在于能够解锁当前模块化系统无法实现的全方位具身多模态推理能力。例如,当人类随意画出几何形状时,机器人能够在统一的表示空间中进行多层次推理,理解二维图形并将其转化为三维空间中的物理操作。机器人还能进行物理空间推理,理解积木放置对整体结构稳定性的影响,并预测不同操作路径可能导致的结果。
更这一架构下的机器人还具备推理链的自主探索能力。面对复杂环境,系统能够整合视觉观察、空间记忆和常识知识,构建出连贯的推理链条,并基于常识知识进行灵活决策。这种推理过程是端到端学习的自然涌现,体现了感知、记忆、推理和行动的无缝整合。
机器人还能从观察人类的操作视频中推断行为背后的深层意图和目标状态。这种能力超越了简单的动作模仿,展现了真正的自主学习和人机协同能力。当机器人观看人类操作积木的视频时,它能够理解每个步骤的意图,并自主执行相应的操作。
这一转变的意义在于,它让机器人能够像海德格尔所描述的熟练工匠一样,将感知、理解和行动无缝融合。机器人不再需要经历冗长的串行处理过程,而是在统一的表征空间中被直接理解为实现特定意图的媒介。这种多模态信息的并行融合处理,使得具身多模态推理能力得以自然涌现,让机器人最终能够像人类一样流畅地与物理世界交互。
自变量机器人团队的这一创新不仅为人工智能领域带来了新的突破,也为未来机器人的发展指明了方向。这一统一架构的提出,标志着人工智能正向着更加智能化、自主化的方向发展。