字节跳动旗下的Seed团队在7月22日宣布了两项重要成果:一款名为GR-3的高性能视觉语言动作(VLA)模型,以及一款与之配套的通用双臂移动机器人ByteMini。这两款产品的发布,标志着Seed团队在机器人智能化领域迈出了重要一步。
GR-3模型的最大亮点在于其卓越的泛化能力。与以往需要大量机器人轨迹数据训练的VLA模型不同,GR-3仅需少量人类数据即可实现高效微调,迅速适应新任务和新物体。这意味着,GR-3能够快速“学习”并理解包含抽象概念的语言指令,从而在复杂多变的环境中展现出强大的适应性。GR-3还能精细地操作柔性物体,这一能力在以往的VLA模型中并不常见。
GR-3在处理长程任务和高灵巧度操作方面也表现出色。这得益于其改进的模型结构,使得GR-3能够同时处理双手协同操作、柔性物体操作以及融合底盘移动的全身操作等多种复杂任务。这种多任务处理能力,使得GR-3在实际应用中具有更高的灵活性和实用性。
为了实现GR-3的这些能力,Seed团队采用了一种多样的模型训练方法。他们不仅收集了遥操作机器人获取的高质量真机数据,还通过用户授权征集了基于VR设备的人类轨迹数据,以及公开可用的大规模视觉语言数据。这些多样性数据的融合,为GR-3的训练提供了丰富的“营养”,使其能够在复杂多变的环境中快速学习和适应。
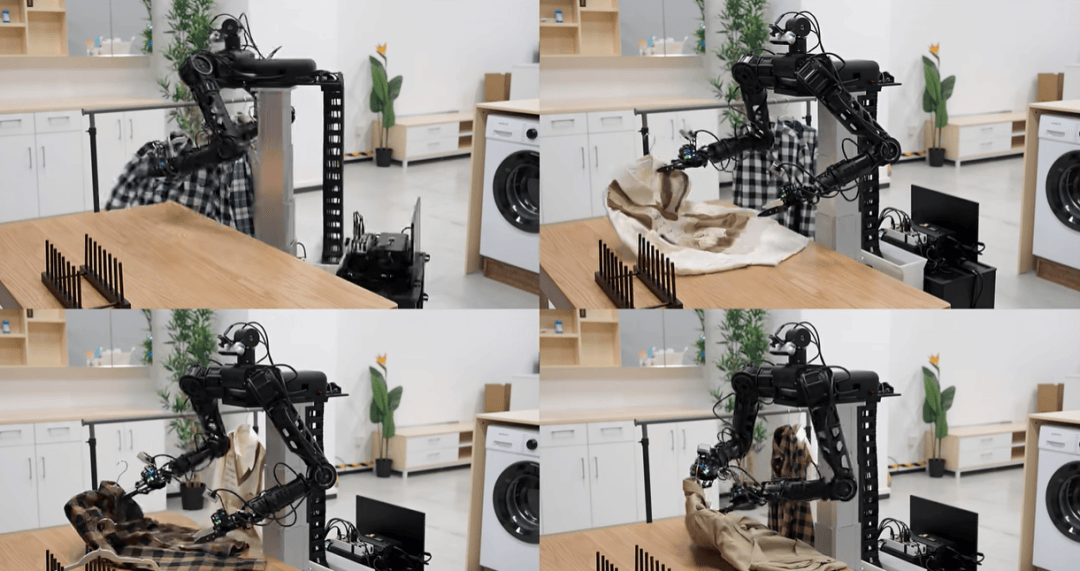
而与GR-3配套的ByteMini机器人,则是一款高灵活性、高可靠性的通用双臂移动机器人。这款机器人专为GR-3设计,搭载了无偏置7个自由度机械臂和22个自由度全身运动系统。机械臂手腕采用球形设计,能够在狭小空间内完成各种精细操作。同时,ByteMini还搭载了多颗摄像头和全身运动控制系统(WBC),使其能够高效地在真实环境中处理复杂任务。
在实际应用中,GR-3和ByteMini的组合展现出了惊人的表现。在超长序列的餐桌整理任务中,GR-3能够高鲁棒性、高成功率地完成任务,并严格遵循人类分步指令。在复杂灵巧的挂衣服任务中,GR-3能够控制双臂协同操作可形变柔性物体,并鲁棒识别并整理不同摆放方式的衣服。在各类物体抓取放置任务中,GR-3能够泛化到抓取未见过的物体,并理解包含复杂抽象概念的指令。
从技术层面来看,GR-3采用了MoT的网络结构,将“视觉-语言模块”和“动作生成模块”结合成了一个40亿参数的端到端模型。这种结构使得GR-3在处理复杂任务时更加高效和准确。同时,GR-3的数据训练方法也突破了传统机器人的局限,采用了三合一数据训练法,从多种数据源中学习知识,进一步提升了其泛化能力和适应性。