
随着科技的飞速发展,物理AI领域正步入一个崭新的时代。人形机器人,这一专为适应人类为中心的城市和工业环境而设计的智能助手,正逐渐从工厂车间扩展到医疗健康等多个领域,以其高效的自动化能力,协助人类完成繁重、单调或体力要求高的工作,有效缓解了劳动力短缺的难题。
然而,人形机器人的构建并非易事,它涉及诸多复杂的工程挑战。从感知、自由度、灵巧性、移动性,到认知功能和全身协调控制,每一项都是对人类智慧的极限考验。为了克服这些挑战,科研人员正加速推进机器人技术和人工智能(AI)的发展,力求在机器学习、物理仿真、传感器技术和机电一体化等关键技术上取得突破。
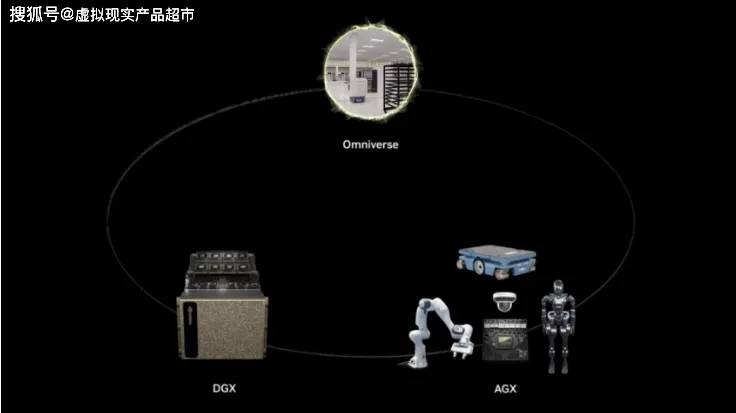
在这一背景下,NVIDIA等科技巨头正积极开发加速系统、蓝图、工具、服务、算法等,以助力人形机器人的研发。他们提出了一套全新的解决方案,包括三台计算机系统的协同工作,为人形机器人的智能化提供了坚实的基础。
首先,NVIDIA AI超级计算机,搭载H100或B100处理器,负责训练强大的生成式AI模型和机器人基础模型。其次,NVIDIA OVX计算机,利用RTX GPU,专注于合成数据生成、机器学习和仿真测试,以及基于Omniverse平台的仿真框架构建。最后,安装在机器人本体上的实时计算机,如NVIDIA Jetson Thor,能够运行低延迟、高吞吐量的推理任务。
为了加速人形机器人的开发进程,NVIDIA还推出了GR00T研究计划和开发平台。该平台专注于通用机器人基础模型和数据工作流的研究,旨在通过训练通用技能,使人形机器人能够适应不同的任务和环境。GR00T N作为全球首个用于通用人形机器人的开源基础模型,能够接受多模态输入,在不同环境中执行操作任务。
在人形机器人的开发过程中,仿真技术发挥着至关重要的作用。NVIDIA Isaac Sim和Isaac Lab等机器人学习和仿真框架,基于Omniverse平台构建,能够实现物理精确的仿真,以并行训练和验证多个人形机器人智能体。这不仅提高了开发效率,还大大降低了将机器人部署到现实世界中的风险。
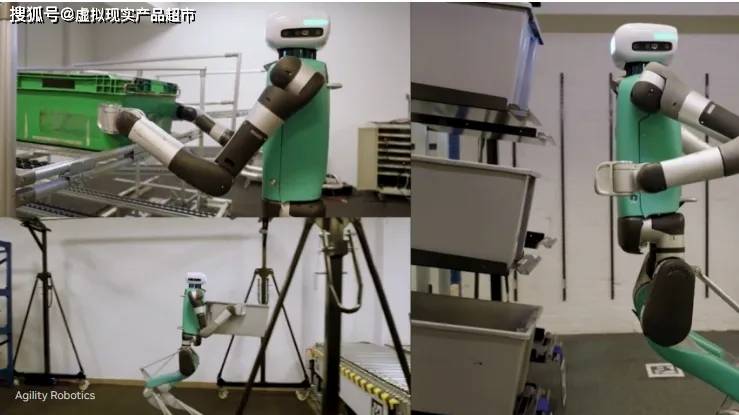
GR00T工作流还涵盖了数据生成和处理、灵巧操作、移动性和全身控制等多个方面。通过合成数据生成、强化学习模型训练以及先进的运动规划和控制策略,人形机器人能够逐步掌握各种高级技能,如灵巧抓取、复杂环境中的导航以及全身协调运动等。
在感知方面,GR00T-Perception借助强大的感知库、基础模型和参考工作流,提升了人形机器人的态势感知和交互效率。这些工具集成了视觉语言模型和检索增强内存等先进技术,使人形机器人能够更好地理解环境、识别物体并作出相应的反应。
最后,机器人硬件同样至关重要。NVIDIA Jetson AGX Thor等新一代机器人本机计算平台,基于Blackwell GPU架构,提供了卓越的AI计算性能。这为边缘计算提供了必要的AI超级能力,为人形机器人的智能化发展奠定了坚实的基础。










