在人工智能领域的璀璨星河中,一颗耀眼的新星于近日升起。复旦大学陈涛教授与余翀博士携手眸深智能首席科学家,共同撰写的论文《以鲁棒压缩边界强化具身AI模型》在2025年国际人工智能联合大会(IJCAI)上荣获杰出论文奖。此次大会共收到5404篇投稿,最终录用1042篇,录用率仅为19.3%。在如此激烈的竞争中,仅有3篇论文脱颖而出,而眸深智能团队作为中国大陆的唯一代表,摘得了这一殊荣,打破了近五年来中国大陆团队在IJCAI杰出论文奖上的空白记录。
眸深智能,这家由复旦大学资深教授、国际大厂首席科学家及连续创业者联袂创立的企业,正引领着一场前所未有的技术革命。作为全球首个专注于“生成式通用具身大脑”的创新企业,眸深智能的核心研发团队深耕复旦大学,他们不仅在动作生成、三维感知、模型压缩、软硬协同等具身智能的全链路技术上取得了突破,还自研了一系列代表性成果。其中,MotionGPT系列作为全球首个生成式人体运动控制大模型,已在NeurIPS 2023上大放异彩;而LL3DA,这一三维感知与决策一体化模型,更是摘得了2023年国际计算机视觉会议三维目标识别大赛的桂冠,并于ICCV 2024上发表。MADTP框架作为全球首个针对多模态大模型的轻量化动态对齐框架,也在CVPR 2024上展现了其独特魅力。
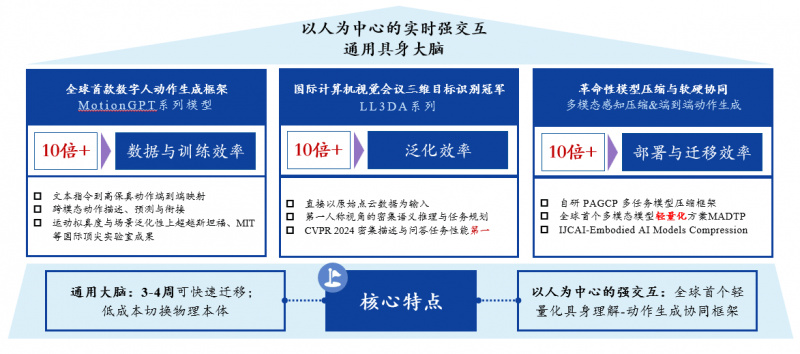
此次获奖的论文,是业内首次针对具身大模型轻量化进行深入探索的工作。眸深智能团队开创性地提出了一种新的范式,旨在同步提升具身智能模型的运行效率与鲁棒压缩边界。实验结果显示,该方法能够在真实场景中精准找到具身大模型精度、效率与鲁棒性的最佳平衡点。这一成就不仅彰显了眸深智能在具身大模型底层架构设计与开发方面的深厚底蕴,更为该领域的未来发展指明了方向。团队对具身大模型的深刻理解,让他们在压缩与轻量化过程中找到了精准的切入点,通过token细粒度优化与架构调优,实现了对具身大模型架构的高效优化。
目前,眸深智能的软硬协同系统已在多个机器人本体和行业领域实现落地,包括光华一号、宇树G1、国地中心青龙等,开创了“运动控制-决策建模-平台部署”的全链路突破,将通用具身智能从技术概念推向了真实应用的广阔天地。同时,公司也与小米、国家地方共建人形机器人中心、英伟达、头部汽配厂等多家头部企业建立了紧密的合作关系,共同推动具身智能技术的革新与发展。