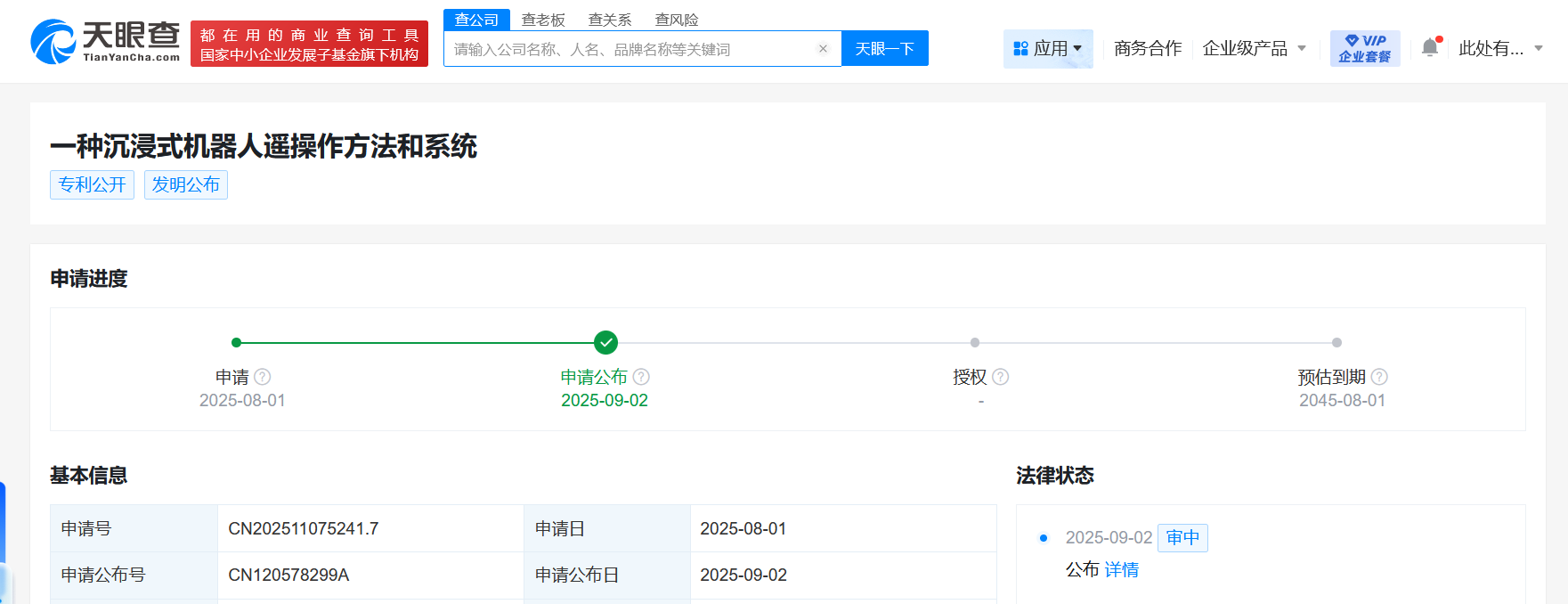
杭州宇树科技股份有限公司在机器人遥操作技术领域取得了新突破,该公司申请的“一种沉浸式机器人遥操作方法和系统”专利近日被正式公布。
据天眼查信息显示,这项发明旨在解决当前遥操作方案中存在的反馈机制不足、操作直觉性差以及控制精度低等问题。这些问题限制了复杂、精细操作任务的执行能力。为了克服这些挑战,杭州宇树科技提出了一系列创新模型,包括第一人称映射模型、交互数据采集模型、遥操作处理模型、执行感知模型以及沉浸视角仿真模型。
通过这些模型的协同作用,操作者的姿态动作能够实时映射到系统中,并生成可在VR设备中实时展示的响应三维图像。这种机制为操作者提供了一种有效且及时的第一人称视角沉浸式反馈,使他们仿佛置身于操作现场,从而极大地提高了交互的沉浸性、直观性和自然性。

该专利的公布不仅展示了杭州宇树科技在技术创新方面的实力,也为机器人遥操作领域带来了新的发展方向。通过这种沉浸式遥操作方法和系统,操作者能够更加精准地控制机器人,显著提升操控能力和任务执行效果。
据了解,这项发明的核心在于第一人称视角的沉浸式反馈机制。通过构建多个模型,系统能够实时捕捉并响应操作者的动作,生成逼真的三维图像,使操作者仿佛亲自执行任务。这种身临其境的感觉不仅提高了操作的直观性和自然性,还有助于提升操作效率和准确性。
杭州宇树科技的这一创新成果有望为机器人遥操作领域带来革命性的变化。随着技术的不断进步和应用场景的拓展,这种沉浸式遥操作方法和系统将在更多领域发挥重要作用,为行业发展注入新的活力。