近日,一份深度探讨机器人大模型发展的报告引起了广泛关注。这份详尽的报告长达56页,深入剖析了人形机器人在实现产业化过程中对于高智能大模型的迫切需求,以及当前机器人大模型在架构与数据方面的进展与挑战。
人形机器人若想在产业中站稳脚跟,必须突破传统工业机器人的局限,具备感知、决策与反馈的全方位能力。这些能力的实现,离不开大模型所支撑的多模态理解与泛化能力。尽管当前的多模态大模型为人形机器人提供了初步的“大脑”功能,但整体智能化水平仍处于L2的初级阶段,距离真正的泛化智能尚有较大差距。
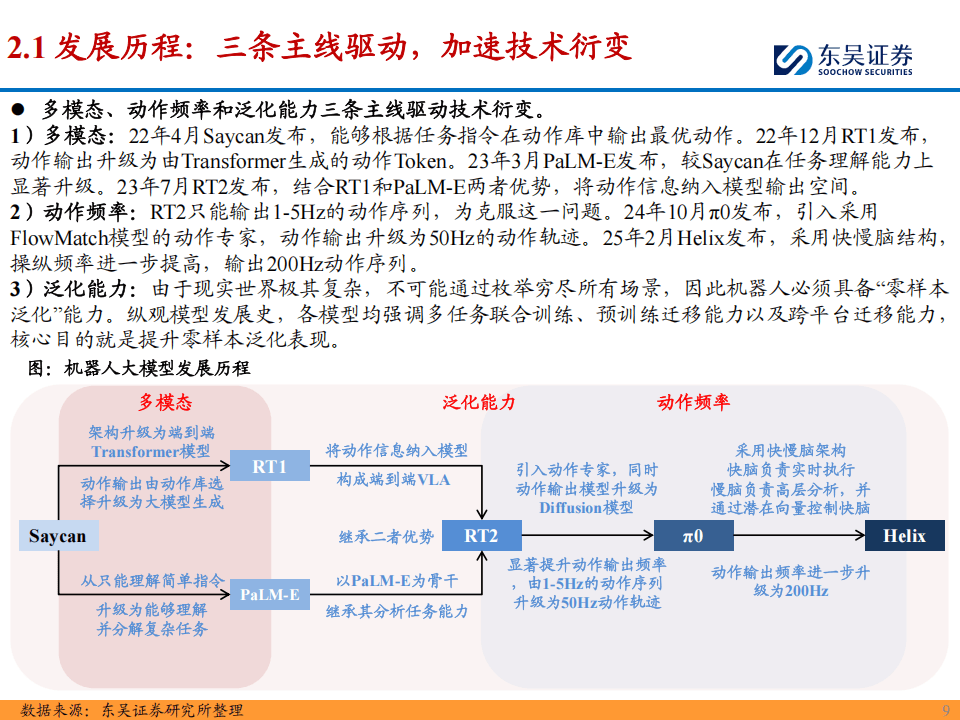
在架构层面,机器人大模型经历了从初步的语言规划模型,如SayCan,到RT-1实现端到端动作输出的演进。随后,PaLM-E、RT2等模型进一步融合了多模态感知能力,形成了“看图识意、理解任务、生成动作”的完整链条。近年来,π0引入了动作专家模型,将动作输出频率提升至50Hz;而Helix则实现了快慢脑并行架构,控制频率更是突破至200Hz,显著提升了操作的流畅性与响应速度。
数据方面,当前机器人大模型的发展依赖于互联网、仿真与真机动作三类数据的协同支撑。互联网数据以其庞大的数量和低廉的成本,在预训练阶段发挥着重要作用,但场景泛化能力相对较弱。仿真数据则以其高质量和较低的成本,在预训练中同样占据一席之地,然而仿真与现实之间的差距仍是亟待解决的问题。真机数据虽然质量最高,对后训练效果至关重要,但采集效率低、成本高,且依赖动捕设备。光学动捕虽精度高,但更适用于集中式训练场;惯性动捕则灵活便捷,能适应不同场景。

展望未来,具身大模型将在多个维度上迎来新的发展。在模态上,可能会引入触觉、温度等新的感知通道,进一步提升机器人的感知能力。在推理机制上,通过构建“世界模型”进行状态预测,将显著提升环境建模与推理能力。在数据端,仿真与真实数据的融合训练将成为主流趋势,高标准、可扩展的训练场将成为推动机器人大模型发展的关键支撑。
这份报告不仅梳理了机器人大模型的发展历程与现状,更为其未来的发展指明了方向。随着技术的不断进步和数据的日益丰富,我们有理由相信,人形机器人距离实现真正的泛化智能将越来越近。