自然界中,动物的行走、呼吸等节律性运动往往流畅而协调,这些动作的完成并不完全依赖大脑的即时指令。科学家发现,这一能力源于神经系统中的“中枢模式发生器”(CPG),它是一个由神经元构成的小型网络,能够自主产生有节奏的电信号,驱动肌肉完成周期性动作。CPG不仅存在于生物体内,也为机器人运动控制提供了重要灵感。
传统四足机器人运动控制多依赖简单的四神经元CPG架构,但这类设计存在明显局限:步态类型单一,通常仅能实现三种左右的基本步态,远不及自然界中四足动物的六种主要步态;同时,对单条腿内多个关节的协调控制能力不足,无法同时精准控制髋关节和膝关节的运动。针对这些问题,浙江大学曲绍兴研究团队提出了一种基于对称性原则的新型八神经元CPG网络,为四足机器人运动控制开辟了新路径。
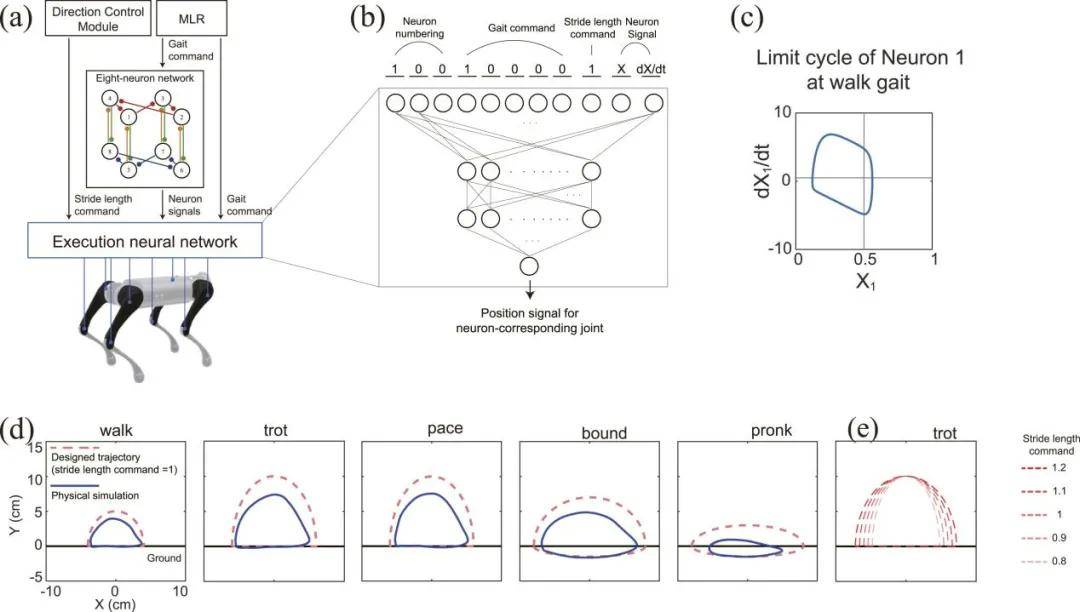
研究团队从数学对称性理论出发,发现CPG的步态生成能力主要取决于神经元连接网络的对称性结构,而非单个神经元的数学模型。他们首先验证了四神经元网络具备产生五种步态的理论潜力,包括行走、小跑、溜步、跳跑和腾跃。然而,这一网络在面对单腿多关节协调控制时仍显不足。为此,团队创新性地将控制单条腿的“抽象”神经元拆分为两个具体神经元,分别控制髋关节和膝关节,并通过局部对称性连接形成小单元。最终构建的八神经元CPG网络,既保留了全局对称性以协调腿间运动,又引入了局部对称性以实现单腿关节的独立控制。
这一网络结构可类比为立方体:顶层四个神经元控制四条腿的髋关节,底层四个神经元控制膝关节。通过这种设计,每个关节都获得了专属的节律控制单元,大幅提升了机器人的运动协调能力。在数值仿真中,该网络成功稳定产生了五种步态,验证了其基础功能的有效性。
步态的稳定切换是高性能CPG的核心挑战。五种步态意味着存在二十种可能的转换路径,其中许多转换极易失败。研究团队通过深入分析转换过程,归纳出四种高效策略:直接切换,通过调整核心参数实现简单步态间的快速转换;强力配对,对特定神经元施加短暂强刺激以稳定目标步态;等待-切换,延迟切换直至最佳时机以确保成功率;等待-强力配对,结合前两者优势处理复杂转换。这些策略利用了神经动力学系统的分岔特性,确保了关节控制信号的连续平滑,避免了运动突变。
为验证理论效果,研究团队在物理仿真环境中使用商用四足机器人模型(Unitree Go1)进行了全面测试。测试架构包含调节模块、中脑运动区和CPG网络。结果显示,机器人不仅能稳定实现五种步态,步态转换成功率也极高:行走、小跑和溜步间的转换成功率接近100%,涉及跳跑和腾跃的复杂转换成功率也优于多数现有方案。转换过程中,机器人身体姿态、运动速度和重心高度变化微小且平滑,展现了优异的稳定性和适应性。
团队还设计了两种传感器融合控制框架,进一步提升了机器人的环境适应能力。第一种框架通过头部摄像头识别地面路径标记,结合模糊控制器调整步幅实现自主转向和路径跟踪;第二种框架在髋关节处模拟扭矩传感器,当机器人走上斜坡时,关节扭矩增大触发反射回路,CPG自动将步态从小跑切换为更稳定的行走,回到平地后再切换回小跑。这些设计体现了感知-动作闭环的思想,显著增强了机器人的自主性。
这项研究通过对称性原则构建的八神经元CPG网络,不仅增加了四足机器人的步态多样性,还解决了单腿多关节协调控制难题。结合多种步态切换策略和传感器融合框架,机器人在仿真测试中展现出了接近生物水平的适应性和稳定性。目前,研究团队正将这一技术拓展至人形机器人运动控制,探索其在多自由度、高动态步态生成与切换中的潜力,为具身智能研究和复杂环境下的机器人自主运动提供了新方案。