在复杂路况中驾驶时,驾驶员常因视野局限陷入被动:城市路口的车道拥堵难以预判,高速公路的突发减速易引发连锁反应。为破解这一难题,高德地图通过空间智能架构升级TrafficVLM交通视觉语言模型,将导航体验从“局部感知”推向“全局掌控”,重新定义了智能出行的技术边界。

升级后的TrafficVLM以“交通孪生还原”技术为核心,构建起覆盖任意区域、任意尺度的动态数字交通系统。无论是北京国贸桥的立体交叉路口,还是广州老城区的狭窄巷道,系统均能实时生成与现实同步的交通视频流。这些数据不仅为模型提供训练素材,更通过云端调度实现分钟级更新——当3公里外发生追尾事故时,系统可立即捕捉现场画面,分析拥堵蔓延趋势,并在驾驶员抵达前推送避险建议:“前方事故导致拥堵,建议提前靠右并线,注意应急车辆通行”。
与传统导航的“文字提示”不同,TrafficVLM通过视觉语言交互实现决策透明化。用户点击导航界面即可切换至事故现场视角,高清画面中不仅显示车流动态,更通过深度信息分析还原拥堵空间结构。例如,系统会标注变道时机、减速距离等关键参数,帮助驾驶员理解“为何要绕行”而非机械执行指令。这种从“被动接收”到“主动洞察”的转变,使复杂路况变得可视化、可感知。
技术架构层面,TrafficVLM以通义Qwen-VL为底座,针对交通场景进行专项强化。模型需同时处理两种视觉模态:一是识别车辆、车道线、信号灯等静态元素,二是解析车流互动、减速传导等动态关系。通过海量交通数据的训练,模型可预测拥堵成因与发展趋势,形成“感知-分析-决策”的完整闭环。例如,当检测到某车道车辆频繁变道犹豫时,系统会结合历史数据预判拥堵风险,提前调整路线规划。
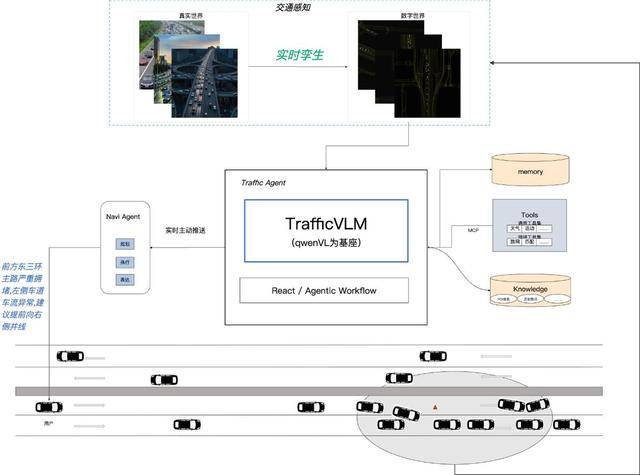
高德团队透露,交通孪生系统的构建依赖三项核心技术:首先是多尺度空间建模,确保从城市主干道到社区道路的数据全覆盖;其次是实时视频流生成,通过云端渲染实现与物理世界的秒级同步;最后是跨模态语义理解,使模型能同时解析图像、文本与交通流数据。这些技术共同支撑起TrafficVLM的“全知视角”,让导航从路线指引工具升级为交通决策伙伴。
在实际应用中,该系统已展现出显著优势。以演唱会散场为例,模型可同步捕捉鸟巢周边道路的车流变化,分析观众离场路线与公共交通接驳点的叠加影响,动态调整导航策略。这种基于全局数据的决策能力,使复杂场景下的出行效率提升30%以上,同时将突发风险预警时间提前至拥堵形成前5分钟。
TrafficVLM的突破不仅在于技术融合,更在于重新定义了导航的价值维度。通过将AI决策能力嵌入交通场景,系统将驾驶员从信息过载中解放,转而提供可解释、可操作的决策依据。这种“人-机-环境”的协同模式,标志着智能导航从工具属性向服务属性的进化,为未来自动驾驶时代的车路协同奠定了基础。