当人形机器人从实验室走向真实世界,仅靠流畅的动作演示远远不够。它们需要一种能够感知细腻力觉的能力——这种能力不是简单的碰撞检测,而是像人类手指般精准感知压力、剪切力甚至微小扭转的复合感知。支撑这场“触觉革命”的核心部件,正是被称为机器人力觉感知“终极形态”的六维力传感器。
与传统一维传感器仅能测量单一方向压力不同,六维力传感器能同时捕捉空间中的三个力分量(Fx, Fy, Fz)和三个力矩分量(Mx, My, Mz)。其工作原理类似植入机器人关节的“力觉陀螺仪”:当弹性体受到外力作用时,精密设计的金属结构会发生微米级形变,内部布置的应变片将形变转化为电信号,再通过非线性解耦算法实时解算出完整的力和力矩信息。这种能力让机器人首次具备了“理解”交互力的本质——无论是推力、拉力还是带有旋转的复合力。
对于双足人形机器人而言,六维力传感器已成为从“笨拙机械”迈向“灵巧操作”的关键。在精密加工场景中,装配该传感器的机械臂能像老师傅般感知工件表面的反作用力,实时调整打磨压力和姿态,实现主动柔顺控制。这种人机协作的安全基石同样依赖力觉感知:当人类意外触碰机械臂时,传感器能在毫秒级时间内检测到异常外力,立即触发避让或急停程序,比视觉检测更快更可靠。更关键的是动态平衡能力——通过脚踝传感器实时解算零力矩点(ZMP),机器人能像人类一样在崎岖地面自主调整重心,这项能力被研发团队视为“步态算法的根基”。
行业估算显示,一台成熟人形机器人至少需要4个六维力传感器(分布于手腕、脚踝)和28个关节力矩传感器,这种海量需求背后是极高的技术门槛。核心挑战在于“耦合与解耦”的矛盾:弹性体既要足够坚硬以承受大载荷,又要足够柔软以产生可测形变。研发团队耗时半年通过有限元分析迭代上百版设计,最终在刚度、灵敏度与维间耦合间找到平衡点。而解耦算法的突破更具挑战性——当施加单一轴向力时,传感器输出信号会混杂其他五个维度的干扰,团队采用非线性算法模型结合海量标定数据,将交叉耦合误差从5%压缩至1%以下,实现了力控精度的量级跃升。
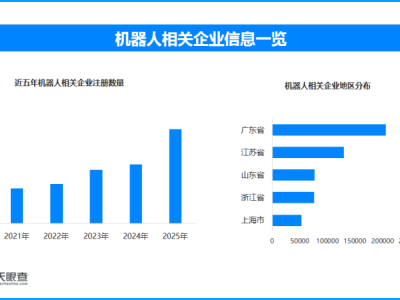
五年前,这个市场还被海外品牌垄断,高昂的价格和漫长的交货周期制约着行业发展。国内厂商从算法创新和结构设计切入破局:通过优化弹性体拓扑结构提升抗干扰能力,自研非线性解耦算法降低计算复杂度。如今,国产传感器在维间耦合、迟滞等核心指标上已比肩国际标杆,部分参数甚至实现反超。智元、小米、优必选等企业已规模化采用国产传感器,今年上半年某厂商的关节力矩传感器出货量突破7万套,占据国内市场主导地位。
技术演进正朝着三个方向加速:微型化让传感器体积缩小90%、重量减轻80%,可无缝集成到机器人关节;智能化赋予其自诊断、自校准能力,甚至能根据任务自适应调整参数;成本优化则通过标准化设计和工艺革新,推动单价从万元级向千元级下探。当这些突破汇聚时,六维力传感器将不再局限于人形机器人,而是广泛渗透到工业协作、医疗康复等更多场景。
让人形机器人真正“像人”的,不是酷炫的外形模仿,而是深入机械肌理的感知革命。六维力传感器作为这场变革的核心,正在将冰冷的钢铁躯壳转化为具有“血肉之躯”感知能力的智能体。中国厂商凭借对技术极限的突破和对应用场景的深度理解,已在这场全球竞赛中占据重要席位,而这场静默的“触觉革命”,才刚刚揭开序幕。