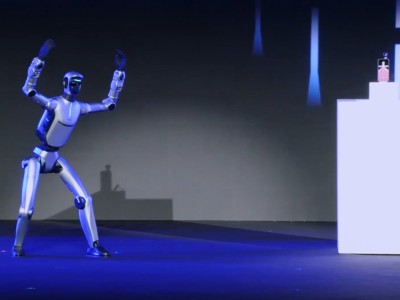
一款革命性的手指关节装置正悄然改变仿生手与机器人抓爪的设计逻辑——由弗劳恩霍夫卓越集群“可编程材料”(CPM)研发的“ProFi”(可编程多稳态手指)系统,通过单一可编程超材料实现了传统机械结构的颠覆性替代。该装置无需电机或复杂传动部件,仅凭材料自身的多稳态特性即可在四种稳定位态间切换,为假肢用户提供了更轻便、更美观且功能更强大的解决方案。
传统被动式仿生手虽以价格低廉和外观逼真著称,但其依赖螺丝、铰链和大量连接部件的设计导致成本居高不下,且维护复杂。ProFi系统的核心创新在于用一块可编程超材料替代了整个机械结构,使手指能沿单轴灵活弯曲,并可在30度增量下锁定四种不同位态,覆盖抓握、放松和多种手势需求。研究人员通过有限元模拟优化了材料内部的应力分布,确保关节在重复使用中保持刚性,仅在预设路径上发生形变。
制造工艺的革新同样引人注目。优化后的手指采用熔融沉积成型与选择性激光烧结等3D打印技术,实现了一次性成型,无需组装。这种“无组装制造”不仅简化了定制流程,更满足了假肢用户对舒适度和手部自然形态的严苛要求。例如,用户可根据自身手部特征直接打印适配的关节,避免了传统假肢因部件拼接导致的适配问题。
多稳态特性的实现依赖于材料内部的双稳态单元晶格设计。每个晶格由弹性梁结构组成,可在两种稳定状态间快速切换,且无需持续外力维持。研究人员通过专为可编程材料开发的软件工具ProgMatCode,对晶格的几何形态和切换行为进行建模优化,最终使多个晶格协同工作,构建出无需电子装置即可流畅切换位态的手指关节。这种被动式设计在工业自动化场景中尤为突出——简单可预测的机械结构大幅降低了事故风险,提升了操作安全性。
可编程超材料的潜力远不止于此。其宏观特性由内部几何形态决定,而非化学组成,因此可通过外部刺激(如压力、温度)改变结构,实现功能状态的切换。这种特性使系统得以整合为单一自适应部件,显著减轻重量、提升耐久度,并释放了前所未有的设计自由度。机器人、医疗设备与环境技术领域被视为首批受益者,例如,更轻便的矫形器和更灵活的抓握工具已进入研发阶段。
目前,来自多家弗劳恩霍夫研究所的团队正持续推进ProFi项目的落地。他们的目标不仅是简化仿生手设计,更希望为无法承担复杂电子假肢费用的用户提供直观、易用的解决方案。随着研究的深入,这项技术有望从手指关节扩展至整个手部乃至其他肢体部位,推动可编程材料真正融入日常生活,为仿生设备与机器人操纵器开辟全新的设计范式。