特斯拉FSD系统迎来重大更新,继V12版本实现端到端自动驾驶后,V14.1版本正式上线,首次将L4级Robotaxi技术融入乘用车领域。马斯克公开宣称该版本具备"类人意识",引发行业热议。此次更新涵盖实时路况应变、多场景决策优化等核心功能,标志着自动驾驶技术向全场景自主驾驶迈进关键一步。
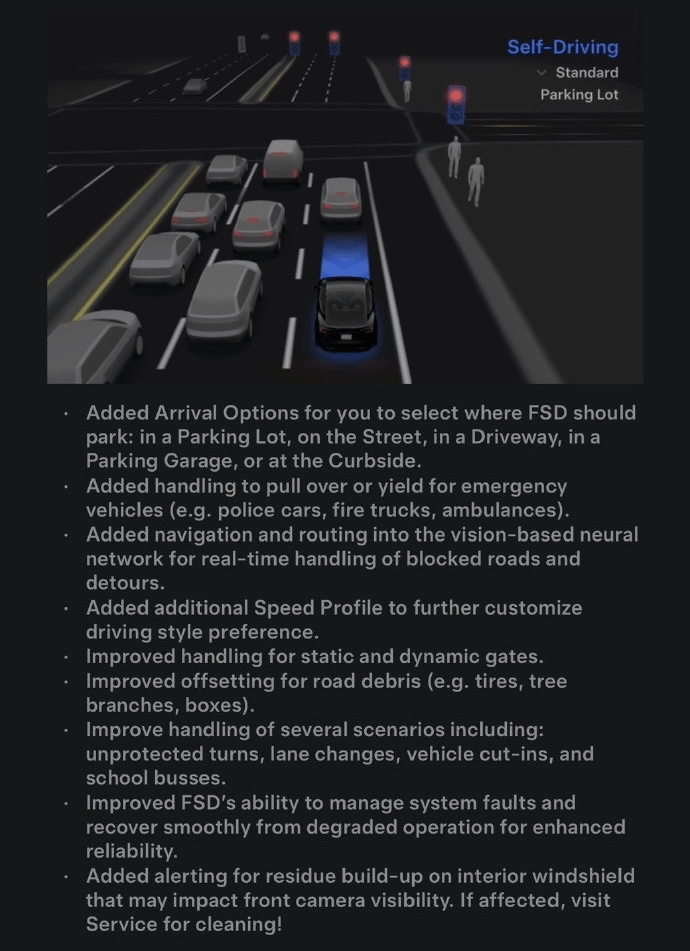
系统核心升级聚焦动态环境适应能力。通过将导航系统深度整合至神经网络,车辆可实时识别道路施工、交通管制等突发状况,自动规划替代路线。测试视频显示,搭载V14.1的特斯拉在麦当劳取餐场景中,不仅精准停靠窗口,还主动调整方向盘角度方便乘客取餐,整套动作流畅自然。面对建筑工人手持的停车指示牌,系统立即响应并在SR界面显示"停止"标识,展现对人类指令的高度理解。
安全功能方面,避障系统实现重大突破。除常规障碍物识别外,新增对轮胎碎片、散落纸箱等不规则物体的精准避让。在特殊车辆应对测试中,当后方警车驶来时,测试车辆主动靠边停车,待两辆警车通过后才重新起步。拥堵路段遇到消防车时,系统自动控制车辆向右腾挪,为应急车辆让出通道,这些场景均体现出对交通规则的深度理解。
用户交互体验迎来全面革新。系统支持单触启动功能,驾驶员可在任意挡位一键激活FSD。驾驶偏好设置新增速度风格选项,允许自定义激进或保守的驾驶模式。到达目的地时,用户可选择停车场、路边或车库等多种停车方式。为提升系统稳定性,开发团队强化了故障恢复机制,并引入摄像头自清洁功能,当检测到污渍影响成像时,会自动提醒用户清洁。
在复杂路况决策测试中,V14.1展现出惊人的应变能力。某测试场景显示,车辆在无保护左转时受直行车流影响未能完成转弯,红灯亮起时卡在路口中央。系统随即启动倒车程序,退回原车道等待下次绿灯,整个过程符合人类驾驶员的决策逻辑。这种基于实时路况的动态调整能力,被业界视为自动驾驶技术的重要里程碑。
对比国内自动驾驶发展,特斯拉在拟人化决策方面表现突出,而国内厂商则在交互设计领域形成差异化优势。华为ADS系统已实现异形障碍物识别,理想汽车等品牌支持驾驶风格学习功能。在传感器清洁方面,国内企业开发出气流吹扫、恒温加热等解决方案。不过在特殊车辆避让功能上,多数国内厂商仍处于测试阶段,尚未实现规模化应用。
交互设计层面,国内车企更注重信息可视化与语音交互。理想、元戎等品牌搭载的VLA大模型,可在SR界面显示决策思考过程,并支持"靠边停"、"加速"等语音指令。这种将驾驶过程透明化的设计,与特斯拉侧重隐式决策的风格形成鲜明对比。专家指出,两种技术路线分别代表了自动驾驶发展的不同阶段,未来可能走向融合。
关于国内落地前景,行业分析指出三大障碍。首先是环境差异,海外训练数据包含大量Robotaxi场景,而国内交通环境、服务流程截然不同,需重建数据模型。其次是路线规划限制,当前系统无法设置途经点,且高架/地面路线选择不透明,难以满足国内用户需求。最关键的是监管差异,海外版本允许驾驶员长时间脱离操作,这与国内现行法规存在冲突。
此次技术共享被视为特斯拉商业生态的重要布局。通过将Robotaxi功能下放至乘用车,既提升了用户使用频率,又构建了数据反馈闭环。新增的"出租车任务流"功能允许车辆自主完成停车取物等操作,为未来共享出行模式奠定基础。随着技术持续迭代,马斯克提出的"空闲车辆自主接单"愿景,正从概念走向现实。