在2025世界机器人大会(WRC)期间,一场聚焦具身智能技术与应用的论坛成功举办,该论坛由北京人形机器人创新中心(同时也是国地共建的具身智能机器人创新中心)精心策划并主持。此次盛会汇聚了来自全国各地的近三百名专家学者与企业代表,共同见证了具身智能技术从理论突破迈向实际应用的关键历程。
随着全球机器人产业的蓬勃发展,具身智能技术正迎来从“能动”向“能用”的蜕变。基础模型能力的提升、感知决策系统的成熟,以及工业、物流等领域对智能机器人的迫切需求,共同推动了技术革新与产业落地的加速融合。

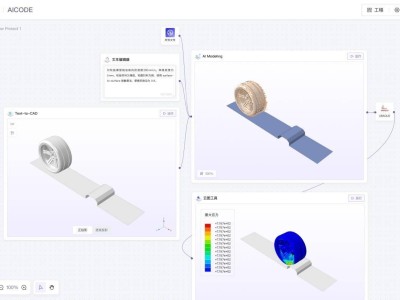
论坛上,一款名为Demain Horizon(明日地平线)的具身智能端到端仿真开发平台惊艳亮相。该平台由京沣科技(北京人形与十沣科技的合资公司)自主研发,旨在解决当前行业面临的设计与控制脱节、仿真与训练割裂等难题。Demain Horizon集成了高保真物理仿真引擎、强化学习训练系统、结构优化分析工具与嵌入式开发环境,为企业和科研机构提供了从CAD设计到优化验证的全流程闭环开发能力。
北京人形机器人创新中心在此次论坛上首次发布了四项具身智能核心成果,标志着其在从“最能跑”到“最好用”的全面进化道路上迈出了坚实步伐。这四项成果包括“具身世界模型体系”、“跨本体VLA模型”、“人形机器人全身控制自主导航系统”以及“千台机器人真实场景数据采集计划”。这些成果共同构成了从认知理解到执行控制、再到数据供给的技术闭环,为具身智能的产业化应用奠定了坚实基础。
其中,“具身世界模型体系”为机器人提供了理解现实与预测变化的核心大脑,该体系包含具备物理时空理解与推理能力的72B具身多模态大模型,以及实现神经网络驱动世界模拟器的基座模型。而“跨本体VLA模型”则让同一模型能够跨本体运行、多场景适配、多技能调用,显著提升了机器人的通用性和扩展性。
在执行控制环节,“人形机器人全身控制自主导航系统”突破了移动与操作协同的瓶颈,让机器人既能稳定行走,又能高效执行任务。该系统由自主导航系统和全身控制系统组成,两大系统协同工作,解决了机器人在移动与操作中的关键技术难题。
为了持续推动核心能力的进化,北京人形还推出了“千台机器人真实场景数据采集计划”。该计划通过搭建远程遥操作中心,让千台机器人走出实验室,深入真实工业场景,持续采集多模态交互数据,为具身智能模型的迭代优化提供了丰富的训练素材。
论坛演讲环节同样精彩纷呈,多位行业专家围绕具身智能的前沿趋势、核心挑战以及未来发展路径展开了深入探讨。俄罗斯工程院外籍院士、苏州大学机电学院院长孙立宁分享了微纳感知在具身智能机器人创新发展中的应用前景;北京大学计算机学院研究员、博士生导师仉尚航则探讨了开放世界具身多模态大模型的构建与挑战;百度智能云百舸平台产品负责人周磊则介绍了如何助力具身智能模型加速迭代。
在圆桌对话环节,与会嘉宾围绕“具身智能如何从实验室突破到产业应用的技术跃迁”这一关键命题展开了深度交流,从技术通路、应用范式到商业模式等多个维度进行了深入探讨。
论坛期间,北京人形还与多家产业链核心企业、科研机构建立了合作伙伴关系,共同推动具身智能技术向实际场景转化。在合作签约仪式上,北京人形与中国电力科学院、百度智能云、特天集团、领益智造等核心机构和企业代表举行了现场签约,标志着各方将围绕协同创新与行业应用展开深入合作,共同打造开放共赢的产业生态。